�l(f��)���r(sh��)�g��2022-03-30���ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժ Ҫ��ᘌ�(du��)��(j��ng)��(j��)��(sh��)���Ͳ�(li��n)�C(j��)�����P(gu��n)��(ji��)�g϶��(du��)��(d��ng)ƽ�_(t��i)λ�þ����cϵ�y(t��ng)���(d��ng)����Ӱ푵Ć�(w��n)�}���� Delta �C(j��)���˞��о���(du��)�����Ô�(sh��)���y(t��ng)Ӌ(j��)ԭ�팦(du��)���P(gu��n)��(ji��)�g϶�� Delta �C(j��)����֧��M(j��n)�����\(y��n)��(d��ng)�W(xu��)�������Y(ji��)�� Lankarani-Nikravesh ��ײ���|��ģ���c���Є�(d��ng)�B(t��i)����ϵ��(sh��)�� Coulomb Ħ��ģ��
����ժ Ҫ��ᘌ�(du��)��(j��ng)��(j��)��(sh��)���Ͳ�(li��n)�C(j��)�����P(gu��n)��(ji��)�g϶��(du��)��(d��ng)ƽ�_(t��i)λ�þ����cϵ�y(t��ng)���(d��ng)����Ӱ푵Ć�(w��n)�}���� Delta �C(j��)���˞��о���(du��)�����Ô�(sh��)���y(t��ng)Ӌ(j��)ԭ�팦(du��)���P(gu��n)��(ji��)�g϶�� Delta �C(j��)����֧��M(j��n)�����\(y��n)��(d��ng)�W(xu��)�������Y(ji��)�� Lankarani-Nikravesh ��ײ���|��ģ���c���Є�(d��ng)�B(t��i)����ϵ��(sh��)�� Coulomb Ħ��ģ�͌�(du��)�P(gu��n)��(ji��)�g϶�V�x��ײ���M(j��n)�����о������ÿ��g����Ԫ��Փ�c�������շ��̣���ֿ��]�����Ą�(d��ng)�۵Ŀ��g��(d��ng)�������c�\(y��n)��(d��ng)�f(xi��)�{(di��o)�P(gu��n)ϵ�������� Delta �C(j��)���ˏ��Ԅ�(d��ng)���W(xu��)ģ�ͣ��ڶ��x�U��̓�L(zh��ng)�ȵĻ��A(ch��)�ϣ����P(gu��n)��(ji��)�g϶�a(ch��n)���ďV�x��ײ���Y(ji��)�ϵ����Ԅ�(d��ng)���W(xu��)ģ���У������˺��P(gu��n)��(ji��)�g϶�� Delta �C(j��)���ˏ��Ԅ�(d��ng)���W(xu��)ģ�͡����� FARO �����ۙ�x��(du��)�g϶���Ԅ�(d��ng)���W(xu��)ģ���M(j��n)�����(y��n)�C�����������}�_�N�����c Workbench ܛ�����挦(du��) Delta �C(j��)���˵����(d��ng)�����M(j��n)�����о�������ԇ�(y��n)�Y(ji��)�����������]�P(gu��n)��(ji��)�g϶�r(sh��)��(d��ng)ƽ�_(t��i)�����c(di��n)���\(y��n)��(d��ng)܉�E�^�����]�P(gu��n)��(ji��)�g϶�r(sh��)������ԇ�(y��n)�\(y��n)�нY(ji��)�����(y��n)�C���g϶���Ԅ�(d��ng)���W(xu��)ģ�͵ĺ������c���_�ԣ����ң�ϵ�y(t��ng)ǰ���A��������l�ʵ���Փֵ�cԇ�(y��n)ֵ������(du��)�`��քe�� 3.544% �� 12.026%�������ஔ(d��ng)�ӽ������⣬�ɷ���Y(ji��)�����l(f��)�F(xi��n) 3 �M�Ą�(d��ng)���� Delta �C(j��)�������C(j��)ϵ�y(t��ng)������ĭh(hu��n)��(ji��)��ԓ�о��ɞ齛(j��ng)��(j��)��(sh��)���Ͳ�(li��n)�C(j��)���˵�λ���`���a(b��)���cϵ�y(t��ng)�p��(y��u)���ṩ������
�����P(gu��n)�I�~���C(j��)����;�\(y��n)��(d��ng)�W(xu��);ģ��;Delta �C(j��)����;�P(gu��n)��(ji��)�g϶;���Ԅ�(d��ng)���W(xu��);�U��̓�L(zh��ng)��;�V�x��ײ��
����0 �� ��
������(li��n)�C(j��)��������C(j��)���˼�����Ҫһ�T[1-5]����ʳƷ���b[6]���r(n��ng)�I(y��)���a(ch��n)[4-5]������ӹ�[7]�����պ���[8]���I(l��ng)�������V���đ�(y��ng)�á��S�����I(y��)ˮƽ����ߣ���(du��)�C(j��)���˵��ٶ��c��������˸��ߵ�Ҫ��(li��n)�C(j��)�����_ʼ�������١��p�ͻ�����l(f��)չ��Ӱ����(d��ng)���W(xu��)�����c���(d��ng)���Ե�����Խ��(l��i)Խ��(f��)�s[9-11]������Ҫ�֞����� 2 ��(g��)���棺1)�������d���r�£����ڙC(j��)���˗U�������Ի���(d��o)�µęC(j��)���˵ď������(d��ng)[12-19];2)�����P(gu��n)��(ji��)�g϶�Ĵ��ڣ���(d��o)���\(y��n)��(d��ng)�^(gu��)�����P(gu��n)��(ji��)�S�c�S��֮�g����ײ���(d��ng)[20-27]����(gu��)��(n��i)��W(xu��)�������σɂ�(g��)���������^���о����������Ǵ����� 2 ��(g��)�Ϊ�(d��)���I(l��ng)��[12-27]������(du��)��ξC�Ͽ��]�U�������c�P(gu��n)��(ji��)�g϶��(du��)ϵ�y(t��ng)�������ܵ�Ӱ푣����g϶�\(y��n)��(d��ng)�W(xu��)ģ�͡��V�x��ײ��ģ���c���Ԅ�(d��ng)���W(xu��)ģ���ЙC(j��)�ؽY(ji��)������(l��i)����δҊ��(b��o)�������⣬���ϵ�y(t��ng)�ط�����(li��n)�C(j��)���˄�(d��ng)���W(xu��)�����c���(d��ng)����Ҳ��һ��(g��)�д�̽ӑ���y�}��
������(j��ng)�{(di��o)�аl(f��)�F(xi��n)����(gu��)��(n��i)ʳƷ���b���a(ch��n)�̌�(du��)�ܝM�㹤��Ҫ���҃r(ji��)�������ʰȡ�(li��n)�C(j��)��������ܴ�����O(sh��)Ӌ(j��)һ����������������r(ji��)������DeltaC(j��)�����@�ú������x��Ŀǰ������ Delta �C(j��)��(g��u)����(d��ng)�P(gu��n)��(ji��)̎�����i�Y(ji��)��(g��u)�����q�ɶ˲������ɣ��@�ӵĽY(ji��)��(g��u)��ʽ��Ȼ���������P(gu��n)��(ji��)�g϶����ͬ�r(sh��)��(du��)����ӹ��c���b��Ҫ��dz��ߣ��S֮����(l��i)���dzɱ�����ߣ���r(ji��)���F����(du��)��һ��С��ʳƷ���b���a(ch��n)�����ԣ�ʹ���@�әC(j��)�����@Ȼ��̫��(j��ng)��(j��)��
�������������J(r��n)�R(sh��)�������O(sh��)Ӌ(j��)��һ�_(t��i)��(j��ng)��(j��)��(sh��)���͵� Delta �C(j��)���ˣ����S�����ֱ���D(zhu��n)��(d��ng)���M�ɻ����q����ʽ��(sh��)�F(xi��n)���q�Ĺ��ܣ���������a(ch��n)�a(ch��n)������������(y��ng)�،����D(zhu��n)��(d��ng)��̎�a(ch��n)���P(gu��n)��(ji��)�g϶�����ڬF(xi��n)�ЙC(j��)е�l���£��M���ܵ�������\(y��n)��(d��ng)�����cϵ�y(t��ng)�����(d��ng)��(w��n)���ԣ��茦(du��)ϵ�y(t��ng)���P(gu��n)��(ji��)�g϶�Ą�(d��ng)���W(xu��)�����P(gu��n)��(w��n)�}�M(j��n)���о���
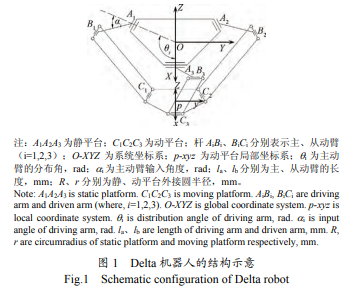
����1 Delta �C(j��)����ϵ�y(t��ng)�����c����(bi��o)ϵ����
����Delta �C(j��)���˵ĽY(ji��)��(g��u)ʾ��D��D 1 ��ʾ��ϵ�y(t��ng)���oƽ�_(t��i) A1A2A3����(d��ng)ƽ�_(t��i) C1C2C3������(d��ng)�� AiBi���Ą�(d��ng)�� BiCi (i=1,2,3)�M�ɡ�����(d��ng)���c�oƽ�_(t��i)֮�g���D(zhu��n)��(d��ng)�P(gu��n)��(ji��)�B�ӣ�����(d��ng)���c�Ą�(d��ng)�ۡ��Ą�(d��ng)���c��(d��ng)ƽ�_(t��i)֮�g�Ի����q����ʽ�B�ӣ����˼ӹ��b���c��Փ�����ķ��㣬�@�ﻢ���q�� 2 ��(g��)�S�����ֱ���D(zhu��n)��(d��ng)�P(gu��n)��(ji��)���档���o����(d��ng)ƽ�_(t��i)������̎�քe������D 1 ��ʾ��ϵ�y(t��ng)����(bi��o)ϵ O-XYZ �c�ֲ�����(bi��o)ϵ p-xyz���O(sh��)��(d��ng)ƽ�_(t��i)���� p ����(du��)������(bi��o)ϵ O-XYZ ������(bi��o)��(x,y,z)��
����2 ���P(gu��n)��(ji��)�g϶��֧��\(y��n)��(d��ng)�W(xu��)ģ��
����Delta �C(j��)�����ɶ���U��ͨ�^(gu��)�D(zhu��n)��(d��ng)�P(gu��n)��(ji��)���B�ӣ����ڼӹ����b���^(gu��)���д����`��D(zhu��n)��(d��ng)�P(gu��n)��(ji��)̎��(hu��)���ɱ���س��F(xi��n)�g϶���ɷ�����֪���P(gu��n)��(ji��)�g϶���S�C(j��)�����\(y��n)��(d��ng)��B(t��i)��׃����׃���ģ������S�C(j��)�ԡ����������J(r��n)�R(sh��)���������Ԕ�(sh��)���y(t��ng)Ӌ(j��)�c���gʸ��ԭ�����A(ch��)�о����P(gu��n)��(ji��)�g϶��֧��\(y��n)��(d��ng)�W(xu��)ģ�͡����˱��ڷ��������x Delta �C(j��)���˵���һ�l֧������о���(du��)�� i �� 1,2,3 �е���һ����(sh��)��
����2.1 �P(gu��n)��(ji��)����(bi��o)ϵ
�����O(sh��)�P(gu��n)��(ji��)����(bi��o)ϵ�� xc ������������(d��ng)�ۡ��Ą�(d��ng)�ۗU�L(zh��ng)����zc ����?y��n)��D(zhu��n)��(d��ng)�P(gu��n)��(ji��)���S������(j��)���ֶ��t�_�� yc���ɵõ��P(gu��n)��(ji��)����(bi��o)ϵ Cout-xcyczc����D 2 ��ʾ��
����2.2 �P(gu��n)��(ji��)�����g϶
��������(j��)�D 2���ɵÏ����g϶ʸ�� Cr=nrΔr���S�� Delta �C(j��)�����\(y��n)��(d��ng)�����P(gu��n)��(ji��)�������S�C(j��)����(d��ng)��nr �����g϶��λʸ�����鷴ӳ�P(gu��n)��(ji��)�g϶ʸ���S�C(j��)�����\(y��n)��(d��ng)��B(t��i)׃�����S�C(j��)���c���_���ԣ�����(j��)��(sh��)���y(t��ng)Ӌ(j��)֪�R(sh��)�����P(gu��n)��(ji��)����(bi��o)ϵ�н���������ܶȺ���(sh��)������(j��)�����P(gu��n)��(ji��)�g϶�����c(di��n)����(du��)�����g϶ʸ�� Cr���O(sh��)����ֲ������B(t��i)�ֲ���
����2.4 ���P(gu��n)��(ji��)�g϶��֧��\(y��n)��(d��ng)�W(xu��)ģ���D(zhu��n)��(d��ng)���ď����P(gu��n)��(ji��)�g϶�������S�c�S�������c(di��n)���غ���ɵ�[27]����D 2 ��ʾ��(k+1)��k �U�����D(zhu��n)��(d��ng)�P(gu��n)��(ji��)�B�ӵăɗU����(k+1)�U����(du��)�� k �U���@�D(zhu��n)��(d��ng)�����D(zhu��n)�S������(du��)�D(zhu��n)��(d��ng)�������D(zhu��n)��(d��ng)�����S�����S������(d��ng)����(j��ng)�������D(zhu��n)��(d��ng)���S�ď�������(d��ng)�������ڰ돽�� rδ�ĈA�΅^(q��)���(n��i)���t����(j��)ƽ���֪�R(sh��)��(k+1)�U������һ�c(di��n) N ����(du��)�� k �U��λ�ÿ��Դ_������D 3 ��ʾ��
����2.4 ���P(gu��n)��(ji��)�g϶��֧��\(y��n)��(d��ng)�W(xu��)ģ��
�����D(zhu��n)��(d��ng)���ď����P(gu��n)��(ji��)�g϶�������S�c�S�������c(di��n)���غ���ɵ�[27]����D 2 ��ʾ��(k+1)��k �U�����D(zhu��n)��(d��ng)�P(gu��n)��(ji��)�B�ӵăɗU����(k+1)�U����(du��)�� k �U���@�D(zhu��n)��(d��ng)�����D(zhu��n)�S������(du��)�D(zhu��n)��(d��ng)�������D(zhu��n)��(d��ng)�����S�����S������(d��ng)����(j��ng)�������D(zhu��n)��(d��ng)���S�ď�������(d��ng)�������ڰ돽�� rδ�ĈA�΅^(q��)���(n��i)���t����(j��)ƽ���֪�R(sh��)��(k+1)�U������һ�c(di��n) N ����(du��)�� k �U��λ�ÿ��Դ_������D 3 ��ʾ��
����3 �P(gu��n)��(ji��)�g϶��ײ�V�x������
���������P(gu��n)��(ji��)�g϶�^С�������S���S���Юa(ch��n)���ļ��ٶȑT�������H���]�S�c�S�װl(f��)����ײ�r(sh��)�a(ch��n)������ײ���cĦ�����������Sײ���S�׃�(n��i)������һ�c(di��n)�ĸ�������ͬ�ģ��������B(t��i)�ֲ����t���g϶�D(zhu��n)��(d��ng)������ײ���|�\(y��n)��(d��ng)ʾ��D��D 5 ��ʾ��
�����ɈD 9 ��֪�����]�P(gu��n)��(ji��)�g϶�r(sh��)��(d��ng)ƽ�_(t��i)�����c(di��n)���\(y��n)��(d��ng)܉�E�^�����]�P(gu��n)��(ji��)�g϶�r(sh��)������ԇ�(y��n)�\(y��n)�нY(ji��)�����(y��n)�C���g϶���Ԅ�(d��ng)���W(xu��)ģ�͵ĺ������c���_�ԡ��mȻ���ߴ���څ��(sh��)��ͬ������δ��ȫ�غϣ���ԭ�����£�
����1)�P(gu��n)��(ji��)�g϶��һ��(g��)�S�C(j��)׃������ԇ�(y��n)�\(y��n)���^(gu��)������ȡֵ���в��_���ԣ�����(sh��)ֵӋ(j��)��r(sh��)�����S�c�S��δ��ײǰ��ȡ�����P(gu��n)��(ji��)�g϶ʸ������(sh��)�W(xu��)���������Դ���һ�����`��;2)Delta �C(j��)���˵��g϶���Ԅ�(d��ng)���W(xu��)ģ����һ��(g��)�߶ȷǾ��ԕr(sh��)׃���̽M������ Newmark ���� MATLAB ���M(j��n)�Д�(sh��)ֵ���r(sh��)����Ӌ(j��)���`��;3)���b Delta �C(j��)��������әC(j��)�Ŀ���ڙC(j��)�����\(y��n)�Еr(sh��)����(hu��)�a(ch��n)���p����(d��ng)��Ӱ푄�(d��ng)ƽ�_(t��i)�����c(di��n)�Č�(sh��)�Hλ�á�
����5.2 ϵ�y(t��ng)���(d��ng)����ԇ�(y��n)����
��������� Delta �C(j��)���˵����(d��ng)���ԣ�����(j��)ʽ(26)��֪ϵ�y(t��ng)���������̣����ϵ�y(t��ng)ǰ���A��������l����ՓӋ(j��)��ֵ�քe�� 148.06��155.67 Hz���@������}�_�N������(du��)���M(j��n)��ģ�B(t��i)�������y(c��)����(d��ng)��(d��ng)ƽ�_(t��i)�������c(di��n)��ϵ�y(t��ng)����(bi��o)�е�����(bi��o)λ�Þ�(0,0,−400)�r(sh��)ϵ�y(t��ng)��ǰ���A��������l�ʣ����õ��ăx���� PCB ��˾�ļ��ٶȂ��������}�_���N�� LMS ��˾�Ą�(d��ng)�B(t��i)��̖(h��o)�ɼ��x��
�������ڏĄ�(d��ng)�۵���A���治����ճ�Ӽ��ٶȂ��������@����ٶȂ�����ճ��������(d��ng)���c�Ą�(d��ng)���B��̎�Ľ��^�ϼ� bi1��bi2̎�������Č�(du��)�Q�ֲ�����һ��(g��)���ٶȂ�����ճ���ڄ�(d��ng)ƽ�_(t��i)�������c(di��n) p ̎���� 7 ��(g��)�y(c��)���c(di��n)���S���ڏĄ�(d��ng)���c��(d��ng)ƽ�_(t��i)�B�ӽ��^�ϼ� ci1��ci2 ̎���}�_���N�Ó������� 6 ��(g��)�Ó��c(di��n)���a(ch��n)�����l���ļ���(l��)��ʹ���܉����^����l�ʷ�����(n��i)����(l��)�����Aģ�B(t��i)���y(c��)�� 7 ��(g��)�y(c��)���c(di��n)�ļ��ٶ���̖(h��o)�����˱M���p�ٸɔ_�c��������ÿ��(g��)����(l��)�c(di��n)�Ó� 5 �Σ�ȡƽ��ֵ���F(xi��n)��(ch��ng)ԇ�(y��n)��D 10 ��ʾ��
�������ā�(l��i)Դ�ڣ����r(n��ng)�I(y��)���̌W(xu��)��(b��o)�������Ї�(gu��)�r(n��ng)�I(y��)�����W(xu��)��(hu��)���k��ȫ��(gu��)�ԌW(xu��)�g(sh��)�ڿ�����2005��ʼ����¿��������O(sh��)�У��r(n��ng)�I(y��)ˮ�����̣��r(n��ng)�I(y��)�b�乤���c�C(j��)е�����r(n��ng)�I(y��)��Ϣ�c늚⼼�g(sh��)���r(n��ng)�I(y��)����h(hu��n)���c��Դ���̣������������̣��r(n��ng)�a(ch��n)Ʒ�ӹ����̵ș�Ŀ��
��������(j��)ԇ�(y��n)����ȡ�� 7 �M�l푔�(sh��)��(j��)���l푷�ֵ�B�ӈD�����пɴ_��ϵ�y(t��ng)ǰ���A��������l�ʵ�ԇ�(y��n)ֵ�քe�� 153.50��176.95 Hz�����⣬�����ܸ�ֱ�^�ط��� Delta �C(j��)����ǰ���A��������l�ʵ�ģ�B(t��i)���ͣ��� Workbench �Ќ�(du��) Delta �C(j��)����ģ���M(j��n)��ģ�B(t��i)���档
�����ɷ��������֪��ϵ�y(t��ng)ǰ���A��������l�ʵķ���քe�� 145.93��147.40 Hz�����ҵ�һ�A��������l�ʵ�ģ�B(t��i)���͞� 3 ��(g��)�Ą�(d��ng)���@ Z �SŤ�D(zhu��n)���ڶ��A��������l�ʵ�ģ�B(t��i)���͞� 3 ��(g��)�Ą�(d��ng)���@�ظ��Ե�����(d��ng)�۷���ǰ��[��(d��ng)���õ���Փ�cԇ�(y��n)��ǰ���A�����l������(du��)�`��քe�� 3.544%��12.026%;�����cԇ�(y��n)��ǰ���A�����l������(du��)�`��քe�� 4.693%��16.700%���ɴ˿�֪����ՓӋ(j��)��ֵ���^�ڷ���ֵ���ӽ�ԇ�(y��n)�Y(ji��)���������Դ���һ�����`���Ҫԭ���ǣ�1)��(sh��)�H����әC(j��)�q�̎�ĽY(ji��)��(g��u)�c�s��ʮ�֏�(f��)�s��������ՓӋ(j��)���c��������Ќ�(du��)���M(j��n)�����m��(d��ng)?sh��)ĺ?ji��n)��;2)��ՓӋ(j��)���c��������в�����?ji��n)�Ԫ���������Ą?d��ng)�۵�ģ�ͣ���(ji��n)���ˌ�(sh��)�H�Y(ji��)��(g��u);3)��ՓӋ(j��)���c��������Л](m��i)�п��]�N����˨����ĸ��С���B�Ӽ���Ӱ�;4)ԇ�(y��n)�^(gu��)�����}�_�N�Ó��|(zh��)���ĺÉČ�(du��)푑�(y��ng)��(sh��)��(j��)���^���Ӱ�;5)ԇ�(y��n)�y(c��)����(sh��)��(j��)�cģ�B(t��i)���R(sh��)�����`��;6)Workbench ��(du��)���ԗU�����־W(w��ng)���|(zh��)���ÉČ�(du��)����Y(ji��)�����^��Ӱ푡�
�������⣬Delta �C(j��)���˵�ǰ���A����ģ�B(t��i)������Ҫ�� 3 �M�Ą�(d��ng)�۵�׃�Σ��@����?y��n)�Ą?d��ng)������(du��)������(d��ng)�ہ�(l��i)�f(shu��)���L(zh��ng)�����^��ļ�(x��)�L(zh��ng)�U�����Դ����������(d��ng)׃�Ρ���ˣ��ڌ�(du��) Delta �C(j��)�����M(j��n)�Мp��(y��u)���r(sh��)����(y��ng)���c(di��n)���]���ƏĄ�(d��ng)�۵Ą�(d��ng)�B(t��i)���ԡ�
����6 �Y(ji��) Փ
�������������һ�N�����g϶�\(y��n)��(d��ng)�W(xu��)ģ�͡��V�x��ײ��ģ�ͺ�����Ԫ��Փ������ Delta �C(j��)�����g϶���Ԅ�(d��ng)���W(xu��)ģ�͵ķ�������ͨ�^(gu��)ԇ�(y��n)�c�����M(j��n)���˷�����
����1)��(d��ng)���W(xu��)ģ���(y��n)�C�c�`��ԇ�(y��n)�������P(gu��n)��(ji��)�g϶��(du��)��(d��ng)ƽ�_(t��i)λ���`���������ɺ�ҕ��Ӱ푣����]�P(gu��n)��(ji��)�g϶���ܜ�(zh��n)�_�ط�ӳ����әC(j��)���挍(sh��)�\(y��n)��(d��ng)��r��
����2)ϵ�y(t��ng)���(d��ng)����ԇ�(y��n)��������Փ�cԇ�(y��n)��ǰ���A�����l������(du��)�`��քe�� 3.544%��12.026%�������ஔ(d��ng)�ӽ����g���(y��n)�C���g϶���Ԅ�(d��ng)���W(xu��)ģ�͵����_�ԣ���ͨ�^(gu��)����_����ϵ�y(t��ng)����ĭh(hu��n)��(ji��)�ǏĄ�(d��ng)�ۡ�
����ԓ�о��ɞ齛(j��ng)��(j��)��(sh��)���Ͳ�(li��n)�C(j��)���˵��`���a(b��)�����Y(ji��)��(g��u)��(y��u)���c��������ṩ������ ——Փ�����ߣ��������������
������ �� �� �I(xi��n)]
����[1] Tan Dapeng, Ji Shiming, Jin Mingsheng. Intelligent computer-aided instruction modeling and a method to optimize study strategies for parallel robot instruction[J]. IEEE Trans. Educ, 2013, 56(3): 268-273.
����[2] Kunt E D, Naskali A T, Sabanovic A. Miniaturized modular manipulator design for high precision assembly and manipulation tasks[J]. The 12th IEEE International Workshop on Advanced Motion Control, Sarajevo, B&H, 2012.
����[3] Yu Dayong. Parallel robots pose accuracy compensation using back propagation network[J]. Int. Journ. of the Phy. Sci. 2011, 6(21): 5005-5011.
����[4] �w����������|����. �r(n��ng)�I(y��)�C(j��)���˵��о��M(j��n)չ�����چ�(w��n)�}[J]. �r(n��ng)�I(y��)���̌W(xu��)��(b��o)��2003��14(1)��20-24. Zhao Yun, Wu Chuangyu, Hu Xudong, et al. Research progress and problems of agricultural robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactionsof the CSAE), 2003, 14(1): 20-24. (in Chinese with English abstract)
����[5] �s�u(y��)�������֣��ޱ��G. �����r(n��ng)�I(y��)�C(j��)���˲�(li��n)�Ș�(g��u)�ͷ����c�Y(ji��)��(g��u)����(sh��)�O(sh��)Ӌ(j��)[J]. �r(n��ng)�I(y��)���̌W(xu��)��(b��o)��2012��28(15)��9-14. Rong Yu, Jin Zhenlin, Cui Bingyan. Configuration analysis and structure parameter design of six-legagricultural robot with parallel-leg mechanisms[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactionsof the CSAE), 2012, 28(15): 9-14. (in Chinese with English abstract)
����[6] Zhang Jianzhong, Xie Xingpeng, Li Chuanjin, et al. FEM based numerical simulation of Delta parallel mechanism[J]. Advanced Materials Research, 2013(690): 2978-2981.
����[7] Tian Y, Shirinzadeh B, Zhang D. Design and dynamics of a 3-DOF flexure-based parallel mechanism for micro/nano manipulation[J]. Microelectronic Engineering, 2010, 87(2): 230-241.
����[8] Yang Chifu, Huang Qitao, Han Junwei, et al. PD control with gravity compensation for hydraulic 6-DOF parallel manipulator[J]. Mechanism and Machine theory, 2010, 45(4): 666-677.
����[9] Zhang Quan, James K M, William L, et al. Trajectory tracking and vibration suppression of a 3-PRR parallel manipulator with flexible links[J]. Multibody Syst Dyn, 2015, 33: 27-60.
����[10] Liu Zhihua, Tang Xiaoqiang, Wang Liping. Research on the dynamic coupling of the rigid-flexible manipulator[J]. Robotics and Computer-Integrated Manufacturing, 2015, 32: 72-82.
����[11] Siamak P, Mehran M, Navid K. A study on vibration of Stewart platform-based machine tool table[J]. Int Adv Manuf Technol, 2013, 65: 991-1007.
����[12] Behrouz A F, Per L, Kristina N. Parametric damped vibrations of Gough-Stewart platforms for symmetric configurations[J]. Mechanism and Machine Theory, 2014, 80: 52-69.
����[13] Wu Jun, Wang Liping, Guan Liwen. A study on the effect of structure parameters on the dynamic characteristics of a PRRRP parallel manipulator[J]. Nonlinear Dyn, 2013(74): 227-235.