�l(f��)���r�g��2020-03-19���ٷ���r(n��ng)�I(y��)Փ���g�[��1��
ժ Ҫ�� ժҪ:����Ǹ���������Ҫ�ǁ�Դ֮һ�������a(ch��n)�����^���о�����Ҫ��λ���������˵��ի@Ч�ʣ���Ҫ�аl(f��)�ի@�C(j��)�Ԅӌ��п���ϵ�y(t��ng)�Ϳ��Ƽ��g(sh��)�������Йz�y�nj��F(xi��n)����Ԅӌ����ի@�Ļ��A(ch��)�c�y�c����ˣ��O(sh��)Ӌ�аl(f��)��һ�N�m��������ʽ����ի@�C(j��)�Č��Йz�y�b�ã����M(j��n)��
����ժҪ:����Ǹ���������Ҫ�ǁ�Դ֮һ�������a(ch��n)�����^���о�����Ҫ��λ���������˵��ի@Ч�ʣ���Ҫ�аl(f��)�ի@�C(j��)�Ԅӌ��п���ϵ�y(t��ng)�Ϳ��Ƽ��g(sh��)�������Йz�y�nj��F(xi��n)����Ԅӌ����ի@�Ļ��A(ch��)�c�y�c����ˣ��O(sh��)Ӌ�аl(f��)��һ�N�m��������ʽ����ի@�C(j��)�Č��Йz�y�b�ã����M(j��n)�������ܜyԇ�����Y(ji��)������:���O(sh��)Ӌ���b���܉_�z�yƫ�x�����еij̶ȣ��錍�F(xi��n)����ʽ���(li��n)���ի@�C(j��)���Ԅӌ��п��Ƶ춨�˻��A(ch��)��
�����P(gu��n)�I�~:����ի@�C(j��);��(d��o)��;�Ԅӌ���;����ƫ�����z�y
����0����
��������Ǹ����������Ҫ���������ڽ�Щ����ҹ��o��(c��)�Y(ji��)��(g��u)���{(di��o)����ʳ�ǃr�������������(qi��ng)���҇��r(n��ng)����˷Nֲ�ķe�O�ԣ�ʳ�Ǯa(ch��n)�I(y��)����������L�����H�o���ǏS�����l(f��)չ���C(j��)[1]��߀���M(j��n)������ʽ���(li��n)���ի@�C(j��)�������аl(f��)���҇�������ի@�C(j��)���ܻ��������^��������ի@�C(j��)е���c���ܻ��̶��c������Ⱦ��кܴ�IJ��[2]��Ŀǰ���҇�����ի@�C(j��)��Ҫ�����M(j��n)�ڞ������ڇ���(n��i)�����аl(f��)������ի@�C(j��)���棬���Ԡ���ʽ����������ʽ(li��n)���ի@�C(j��)�t̎�ژәC(j��)��B(t��i)��Ŀǰ������(n��i)������ի@�C(j��)��������һЩ���}:���a(ch��n)����ի@�C(j��)�ęC(j��)е��ˮƽ�c���a(ch��n)Ҫ����ȥ���h(yu��n)���Ҵ��������ʵ͡�ʹ�óɱ��ߵ���r;�����M(j��n)�����a(ch��n)�ի@�C(j��)е�t���ڲ����m��(y��ng)�҇���˷Nֲ�c�ի@�l���Ć��}[3]��
��������ի@�C(j��)�Ԅӌ��п���������ի@���P(gu��n)�I���I(y��)�h(hu��n)��(ji��)�����治ƽ�����������،�(d��o)�µ�����ի@�C(j��)���I(y��)�^���д���Ư�ƣ��{�T��Ҫ�����{(di��o)������P�Ԍ��R��������У��y�Լ��о����{(di��o)���ի@�|(zh��)�����ƅ���(sh��)��Ӱ��ի@�|(zh��)���cЧ�ʡ���ˣ�����ի@�C(j��)�Ԅӌ��п��Ƽ��g(sh��)������Ҫ���о��rֵ��
�������п��Ƽ��g(sh��)�о���Ҫ���������Йz�y�����о��c܉�E��ۙ�����о��ɲ��֣��������c�о������Йz�y������
���������Йz�y������Ҫ�֞�ҕ�X�z�y�����c�C(j��)е�z�y���������У�ҕ�X�z�y�����܉��ṩ����ƫ���Ǻ͙M��ƫ���ڃ�(n��i)�Č�(d��o)����Ϣ���@Щ��Ϣ���ի@�C(j��)�ˑB(t��i)��������Q�������á�ҕ�X�z�y������Ҫ�֞�ɲ�:��һ���Dz��ÈD��̎�����ֶΫ@�������е������c���ڶ����Dz��û���׃�Q���߾��Իؚw�ķ�����ȡ�����С�ֱ�Ӓ��������еķ�����һЩ�Ͱ����r(n��ng)�������ѽ�(j��ng)�б��^�õ�Ч����������˵������еęz�y���Ѕ����rֵ��M.Montalvo[4]�ᵽ�˿���ʹ��ģ��ƥ��ķ����@�������c��Ȼ��ͨ�^���Իؚw�ķ��������M(j��n)�����������Йz�y�����ԙz�y��ROI��(n��i)�����������У�Ȼ��Ҏ(gu��)����һ�l���^���m��·��������(x��)����[5]��������������һ�Nͨ�^��ȡ���ո��cδ�ո�ֽ羀�ķ����M(j��n)�������Йz�y��BillingsleyJ[6]�քeͨ�^���Իؚw�ķ����s���ˈD��̎������ĕr�g��XuL����[7-8]ͨ�^ʹ���S�C(j��)Hough׃�Q���s����Hough׃�Q����ĕr�g���M(j��n)������˻���ҕ�X�������Йz�y�Č����ԡ�M.Montalvo�������������ķ��������������L�������s�ݱ��^���ܵ���r���������M(j��n)�Йz�y����������@����o�~���ի@�^���е������Йz�y����һ���ą����rֵ������˸��o�c�����y�Էֱ����������ͨ�^�z�y����o�~���M(j��n)�������еęz�y���ٲ�������(x��)���������������ķ����z�y�����С��mȻͨ�^һЩ������Q�˻���ҕ�X�������Йz�y�д��ڵ��R�e�r�g�L�Ć��}��������ҕ�X�Č��Йz�y�������ܵ����ա����ȭh(hu��n)�����ص�Ӱ푣���(w��n)���Բ�C(j��)е�z�y��ͨ�^�C(j��)е�b���c����Ľ��|���������M(j��n)�Йz�y�ķ������ǻ۲�[9]�������G[10]�����һ�N���ڽǶȷ���������ի@�C(j��)���Йz�y�b�ã��M(j��n)���˷����c���M(j��n)�����ի@ԇ��^����ȡ�������õ�Ч��;���ǣ����ᵽ���b���ǻ��ڠ���ʽ����ի@�C(j��)�M(j��n)���O(sh��)Ӌ���O(sh��)Ӌ�������܉�ֱ�ӑ�(y��ng)��������ʽ���(li��n)���ի@�C(j��)���Ԅӌ��п��ơ�
�����������Ϸ����������аl(f��)��һ�N���ڽǶ���Ϣ�����Č��Йz�y�b�ã��܉��ṩ�����Č�(d��o)����Ϣ�����ڌ��F(xi��n)������ʽ���(li��n)���ի@�C(j��)���Ԅӌ��п��ơ�
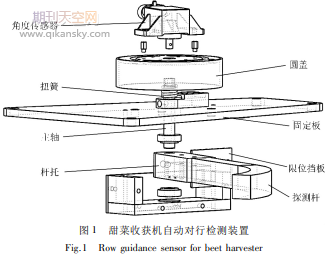
����1����ի@�C(j��)�Ԅӌ��Йz�y�b��
����1.1�b�õĽY(ji��)��(g��u)
�����Ԅӌ��Йz�y�b�ú��IJ�����Ҫ�����ǶȂ�������Ť�ɡ����S�c̽�y�U����D1��ʾ��
��������ի@�C(j��)�Ԅӌ��Йz�y�b�ñ��Ɍ����b������ի@�C(j��)�ھ��b�õ�ǰ����
��������ի@�C(j��)�Ԅӌ��Йz�y�b�ù���ԭ��:�ڹ����^���У���(d��ng)�ի@܇�v������������ո�r�����¶�����沿�ֵĸ����ԏăɂ�̽�y�U���gͨ�^;�ի@܇�vƫ�x��������Еr����˸�¶������IJ��־͕����|����һ��̽�y�U���a(ch��n)��ƫ�D(zhu��n)��ƫ�D(zhu��n)�ĽǶ�ͨ�^���S���f�o�ǶȂ��������ǶȂ������a(ch��n)���Ƕ�ƫ�D(zhu��n)��̖���f�o��������������ͨ�^�\(y��n)�п��Ƴ���l(f��)���D(zhu��n)����̖��������ի@�C(j��)�M(j��n)���D(zhu��n)�����ʹ�ի@�C(j��)�^�m(x��)������������M(j��n)���ո���п���ϵ�y(t��ng)ԭ��D����D2��ʾ��
���������Йz�y�^������ҪŤ�Ɍ��z�y�b���M(j��n)�л�λ��ʹ��̽�y�U�܉�؏�(f��)����ʼλ�á����˲�̽�y�U��λ�r���^��(bi��o)ӛ�����c����ǰ�˼���һ�K��λ���壬ּ�ڷ�ֹ��ɳ�M(j��n)�뵽�b����������b�������ɳ����(d��o)�¶����ĸ��ʡ�
�����ǶȂ������x����elobau��˾���a(ch��n)�ĽǶȂ����������r(n��ng)���ո�h(hu��n)�����ӣ�����ˮ���m���ܷ���Ҫ��O�ߣ��ǶȂ�������늚���o(h��)�ȼ���IP67���܉��m��(y��ng)���ӵ��ո�h(hu��n)����������ݔ��������D3��ʾ��
�����ǶȂ��������g(sh��)����(sh��)��
��������늉�/V:4.5��5.5
����ݔ��늉�/V:0.5��4.5
����������ݔ���y������:-45°��+45°
�����ǶȂ�����ͨ�^�����c�A�w�B�ӣ����������S�c���S�M(j��n)����ϡ����ڂ������Ĝy���������ޣ����Ԃ������İ��b������Ҫ�M(j��n)���{(di��o)�����Է�ֹ�z�y�b�ßo���M(j��n)�������y������������Ҫ�˹��O(sh��)�����c���Դˁ팦�y�����Ĕ�(sh��)��(j��)�M(j��n)��̎�����˷N�������Ԝp����У��(zh��n)�^���еĹ�����
����Ť���x����ֱ�����D(zhu��n)Ť�ɣ�Ť�ɵĸ�헅���(sh��)�����հ��b���g�M(j��n)���O(sh��)Ӌ�����ɵ�һ���cһ�K�а��۵��F�K�̶����F�Kͨ�^픽z�c���S�̶�������ˏ���һ���c���S�Ĺ̶�;������һ�˄t���ɈA�w�����һ���̶��N�M(j��n)�й̶���Ť����Ҫ�M(j��n)���A(y��)�o���Է�ֹ���F(xi��n)�[̽�y�U�ڻؔ[�r���ɻ֏�(f��)�����㌧(d��o)�»؏�(f��)�^������r��
�������Sͨ�^����ӹ��ڈA���S�����ϼӹ�����һ��ƽ�棬�ǿ��]�ڌ��H�ո��^���Е��������^��ě_���������b�����S�c�[̽�y�U�Ĺ̶���ʹ�õĞ�픽z�����N�I��ʹ�ÈA���S����(d��o)�����S�c�[̽�y�U�l(f��)���������ӣ�ʹ�Ùz�y�b�ó��F(xi��n)���ϟo������ʹ�ã��ӹ���ƽ��t����픽z�c���S�ľo����ϡ�ͬ����Ť���c���S֮�g�Ĺ̶�Ҳ��픽z��ϣ���������ϵIJ�λ�ӹ���ƽ�档
�������˱��C�[̽�y�U������ĥ���͛_���c�p���ԣ��[̽�y�U�x���������ϡ����˽�Qֱ���^�����s���c�[̽�y�U�ļm�p���}���[̽�y�Uǰ���O(sh��)Ӌ���л؏�;�[̽�y�U��ʼλ���c��ֱ���ո��е�ƽ���15°�ǡ�ͬ�r�����]����˸�¶������ij̶Ȳ�ͬ�����˱��C̽�y�ķ�(w��n)���ԣ��[�U�O(sh��)Ӌ��ȱȅǻ۲���Փ���������̽�y�U����һЩ��
�������˹̶����Ђ�����������(j��)���Йz�y�b�ü�����ʽ����ի@�C(j��)�O(sh��)Ӌ�ˌ��Йz�y�b�õĹ̶��ܣ���D7��ʾ��
������������ʽ����ի@�C(j��)���_ǰ�˛]�к��m�İ��bλ�ã�������Ҫ�r(n��ng)�C(j��)�S�O(sh��)Ӌ֧�ܣ��Y(ji��)�ψD7��ʾ�Ĺ̶��ܣ������Йz�y�b�ð��b�̶����ھ��b�õ�ǰ����
����1.2���Йz�y�b�õķ���
�������Йz�y�b�������ڻ���ģ�͵Ŀ��ƕr����Ҫ���z�y���M(j��n)�зֽ⣬���������x�õČ��Йz�y�b�Á��f���䌦���^���п��ܵĠ�B(t��i)��Ӌ9�N���Ҵ��ڃɌ���B(t��i)����ƫ��ͬ�ķ���r���|�l(f��)ͬһ��(c��)�z�y�b�ã�������Ҫ����B(t��i)�M(j��n)��ӑՓ������ʹ�à�B(t��i)�c���|�l(f��)���b����һһ����(y��ng)�ġ�
����1.2.1�ի@�C(j��)λ�õķ���
�������A={��ƫ���oƫ����ƫ}������܇�vƫ�x�����еĠ�B(t��i);����B={���|�l(f��)�����|�l(f��)���o�|�l(f��)}������z�y�b���|�l(f��)��B(t��i)��������A�ͼ���B���ѿ����e�����Եõ�A×B={(��ƫ�����|�l(f��))��(��ƫ���o�|�l(f��))��(��ƫ�����|�l(f��))��(�oƫ�����|�l(f��))��(�oƫ���o�|�l(f��))��(�oƫ�����|�l(f��))��(��ƫ�����|�l(f��))��(��ƫ���o�|�l(f��))��(��ƫ�����|�l(f��))}������е�ÿ��Ԫ�طքe����(y��ng)��B(t��i)S(n)�����У�nȡ1��9������(sh��)������(y��ng)�Ġ�B(t��i)�D����D8��ʾ��
�������ȣ����ڠ�B(t��i)S(1)��S(9)�@�ɷN������B(t��i)�鮐��������B(t��i)���ڮa(ch��n)��S(1)��S(9)��B(t��i)֮ǰ���r(n��ng)�C(j��)�ٿv�T���ѽ�(j��ng)���Ԅӌ��Р�B(t��i)�ГQ���ք��{��B(t��i)�������@�ɷN��B(t��i)��һ����r�o�����_(d��)��
����������S(2)��S(8)���˕r����(y��ng)�ęM��ƫ���0������ƫ��t����0�����ڌ��Йz�y�b�Á��f�����ڮ�(d��ng)�y��ֵ��0�r�������������ܷ�����Ч��(sh��)ֵ���o���M(j��n)�зֽ�Ć��};����(d��ng)̎�ڠ�B(t��i)S(2)��S(8)�r�������D(zhu��n)��C(j��)��(g��u)�o����������һ�r�̵Ġ�B(t��i)���քe�D(zhu��n)����S(3)��S(7)��������������B(t��i)��ʹ�Ì��Йz�y�b�ÿ����M(j��n)�������Ĝy��������
������(d��ng)̎�ڠ�B(t��i)S(4)��S(6)�r�����|�l(f��)���Йz�y�b���M(j��n)�Йz�y�������\(y��n)�ӌW(xu��)�̈́����W(xu��)�Ġ�B(t��i)�ֽⷽ�̣����ԫ@�Üy��ֵ���Ϳ���Ӌ��M��ƫ��ͺ���ƫ��;Ȼ��ͨ�^����ģ�͵Ŀ����Ɍ�����܇�v�D(zhu��n)��ʹ��܇�v�܉�ص��A(y��)��������·���ϡ�
��������(j��)���Ϸ��������Ԍ����Йz�y�b�õĹ�����B(t��i)�c���|�l(f��)���b��һһ����(y��ng)��������Ĺ�����B(t��i)��D9��ʾ���ڴ˻��A(ch��)�Ͽ��Ԍ��z�y���M(j��n)�ЙM��ƫ���c����ƫ��ķֽ⡣���·������ǻ���̽�y�U�c�̶�ģ�K�S����ֱ����r��
����1.2.2�z�y���ķֽ�
�����ڌ����Йz�y�b���M(j��n)�Є����W(xu��)����֮ǰ���ȸ���(j��)��Ηl���M(j��n)���\(y��n)�ӌW(xu��)�ķ������M(j��n)����������ģ�Ϳ��������׃�������Йz�y�b�õ��\(y��n)�ӌW(xu��)ģ����D10��ʾ���D10�У�ψe�麽��ƫ�xe��M��ƫ�
�������]��x���r(n��ng)�C(j��)���Փ��������䛿�
����4�Y(ji��)Փ
����1)�O(sh��)Ӌ�аl(f��)��һ�N����ʽ����ի@�C(j��)�Ԅӌ��Йz�y�b�ã�����چμ��ęC(j��)е�_�P(gu��n)�܉��M(j��n)�и����_�ķ������ƣ��O(sh��)Ӌ˼·����ڼ��C(j��)е�_�P(gu��n)��(f��)�s�����C(j��)��(g��u)�������ڌ��F(xi��n)�����Y(ji��)������:���O(sh��)Ӌ�аl(f��)���b���܉��(zh��n)�_�y������ƫ�������M���Ԅӌ��п���������һ�������c�_չ���п��Ʒ������о��������Ԍ��F(xi��n)����ի@���_�Ԅӌ��С�
����2)���Y(ji��)������:��ͬ�Č���ƫ���в�ͬ�ĽǶ��x��(sh��)���ҳ������P(gu��n)ϵ�����M(j��n)��У��֮��߅������ݔ�������������(j��ng)�^̎������Է�ӳ������ƫ�