�l(f��)���r�g��2021-05-28���ٷ���t(y��)�W(xu��)Փ���g�[��1��
ժ Ҫ�� ժҪĿ�ģ�̽ӑ��ȫ�_(d��)����C�����ֹ��p���������ؽ����g(sh��)��ȫθ�г��g(sh��)�Б�(y��ng)�õĿ����ԺͰ�ȫ�ԡ�����������Է���2015��7��~2018��6�|����(zh��n)�^(q��)���t(y��)Ժθ��������ȫθ�������г��g(sh��)���R���Y�ϡ�����(j��)���g(sh��)��ʽ�֞���ȫ�C����ȫθ�г�(Robot-assistedtotalgastrectom
����ժ ҪĿ�ģ�̽ӑ��ȫ�_(d��)����C�����ֹ��p���������ؽ����g(sh��)��ȫθ�г��g(sh��)�Б�(y��ng)�õĿ����ԺͰ�ȫ�ԡ�����������Է���2015��7��~2018��6�|����(zh��n)�^(q��)���t(y��)Ժθ��������ȫθ�������г��g(sh��)���R���Y�ϡ�����(j��)���g(sh��)��ʽ�֞���ȫ�C����ȫθ�г�(Robot-assistedtotalgastrectomy��RATG)�M����ǻ�R�o��ȫθ�г�(Laparoscopicassistedtotalgastrectomy��LATG)�M��RATG�M�ЙC�����R��ǻ��(n��i)�ֹ��p���������ؽ�������UncutRoux-en-Y�ؽ�����;LATG�M���w���Ǻ����������ؽ������Â��y(t��ng)Roux-en-Y�ؽ��������^������ɽM�������g(sh��)ָ��(bi��o)���g(sh��)��(f��)ָ��(bi��o)����(bi��o)���[���W(xu��)ָ��(bi��o)����(j��ng)��(j��)�W(xu��)ָ��(bi��o)���g(sh��)�l(f��)�Y��r���Y(ji��)�����ɽM100�����߾����������g(sh��)��RATG�M�^LATG�M�����пڶ�[(3.95±0.64)cmVs(10.38±1.79)cm��P<0.001]���g(sh��)�г�Ѫ����[(57.10±20.55)mlVs(98.20±28.44)ml��P<0.001]�������g(sh��)�r�g�L[(201.66±16.59)minVs(156.14±16.69)min��P<0.001]���������ؽ��ĕr�L[(56.70±8.78)minVs(36.60±8.17)min��P<0.001]��סԺ�M�ø�[(8.55±1.78)�fԪVs(6.39±0.86)�fԪ��P<0.001]��RATG�M�^LATG�M�g(sh��)��סԺ�r�g��[(5.84±4.76)dVs(6.98±4.31)d��P=0.213]������o�y(t��ng)Ӌ�W(xu��)���x���ɽM�������g(sh��)��ҕ�X��ʹ�u��(VAS)���g(sh��)��TNM���ڡ��ܰͽY(ji��)��ߔ�(sh��)Ŀ������͔ܰ�(sh��)Ŀ���g(sh��)���״��Ś�r�g���״��´���ӕr�g���״��M(j��n)ʳ���|(zh��)�r�g���g(sh��)�l(f��)�Y����IJ���o�y(t��ng)Ӌ�W(xu��)���x(P>0.05)���Y(ji��)Փ����ȫ�_(d��)����C�����ֹ��p���������ؽ����g(sh��)��ȫθ�г��g(sh��)�еđ�(y��ng)���ǰ�ȫ�����еġ�
�����P(gu��n)�I�~ �C�������g(sh��)ϵ�y(t��ng);��ǻ�R;θ��;θ�г��g(sh��)
������(j��)2018��ȫ�Y��(sh��)��(j��)�y(t��ng)Ӌ��θ���l(f��)���ʾ�ȫ�����[����5λ���������ʾӵ�3λ[1]���҇���θ���������(sh��)��(j��)�@ʾ�҇�ÿ���°l(f��)�����s48�f��ռȫ��l(f��)���ʵ�40%[2]��Ŀǰ���w�ί�������Ȼ����������A(y��)�����ľC���ί�����1994��Kitano���������ǻ�Rθ�����g(sh��)��(j��ng)�^��ʮ�����������(chu��ng)�£���ǻ�Rθ�������g(sh��)�ѽ�(j��ng)�@���J(r��n)�ɺ��ƏV[3]���Դ�θ�����g(sh��)�M(j��n)����(chu��ng)�r�����������ڱ����ľ����ԣ���ǻ�R���������ؽ�����đ�(y��ng)���Դ������y�͠��h����ǻ�Rθ�������g(sh��)ͨ����Ҫͨ�^�����o���п����w������������ؽ���Ȼ�������o���пڲ���С���o���ܺõ��w�F(xi��n)��(chu��ng)�ă�(y��u)�ݡ�������ȫǻ�R�µ��������ؽ��y�ȴ��Ǻ���е��ه�ȸߡ����g(sh��)��Ҫ��ߣ����ҌW(xu��)��(x��)�����L���_(d��)����C�������g(sh��)ϵ�y(t��ng)�İl(f��)���͑�(y��ng)��һ���̶��Ͽ˷��˸�ǻ�R�ľ����ԣ�������7�����ɶȵķ�����������S�Ŵ�ĸ������g(sh��)ҕҰ�ȃ�(y��u)���F(xi��n)�˙C�����R���ֹ��p���������ؽ����[Ó�ˌ��Ǻ���е����ه�����F(xi��n)���������x�ϵ���(chu��ng)���g(sh��)�����R���ί������_չ�_(d��)����C����θ�c���g(sh��)�^�磬�e����һǧ���������g(sh��)��(j��ng)���о�����ȫ�C����ȫθ�г��g(sh��)���R���ֹ��������ؽ������M(j��n)�з�����
����1 �Y���c����
����1.1�R���Y��
��������Է���2015��7��~2018��6���ږ|����(zh��n)�^(q��)���t(y��)Ժ��ȫθ�������г��g(sh��)θ�����ߵ��R���Y�ϣ��xȡ50������ȫ�_(d��)����C�����R���ֹ��p���������ؽ�ȫθ�г��g(sh��)�Ļ��ߞ�ԇ�M(RATG�M)�����S�C�xȡͬ��50���и�ǻ�R�o��ȫθ�г��g(sh��)��θ���������錦��(LATG�M)�����л��߾��������g(sh��)ǰ�z�����_���鼰�g(sh��)ǰ�L(f��ng)�U�u�����ų����g(sh��)�����C������Ը�x����ܙC���˻�ǻ�R���g(sh��)���������g(sh��)֪��ͬ������ɽM����һ���Y�ϵIJ���o�y(t��ng)Ӌ�W(xu��)���x(P>0.05��Ҋ��1)�������{���(bi��o)��(zh��n)�����g(sh��)ǰ��(j��ng)θ�R�z�鼰�����\�����_;���g(sh��)ǰCT�u���[�����ڞ����;����ȫθ�г��Ļ���;���g(sh��)ǰ���������t(y��)���f(xi��)��(ASA)�ּ������o���_���g(sh��)�����C�������ų���(bi��o)��(zh��n)���ه�(y��n)����Ѫ�ܻ�����ϵ�y(t��ng)�������λ��I����˥��;�ڹ�Ϣ�г����g(sh��);��(li��n)���K���г�;�ܼ�����θ�����г����g(sh��)ʷ;���h(yu��n)̎�����D(zhu��n)�ơ�
����1.2����
����1.2.1 �����g(sh��)�ڹ���
���������g(sh��)�ڹ�����ѭ���ٿ���(f��)����ί�����[4]�����ٿ���(f��)���̎����ʩ�ж�ʮ���l�����c��(zh��)�е��P(gu��n)�I��ʩ���������g(sh��)ǰ����Ҏ(gu��)��ʳ�����Կڷ�̼ˮ������;�ڲ���Ҏ(gu��)���c����(zh��n)��;�۾���(zh��n)Һ�w�ί�;�ܶ�ģʽ�(zh��n)ʹ;�����ڽ�(j��ng)���M(j��n)ʳ;�������´����;�߃�(y��u)����(d��o)�ܹ���(����Ҏ(gu��)���ñ�θ�ܣ��M��ȥ����ǻ�����ܼ���(d��o)���)��ԓ�����ɼ��ٿ���(f��)��ƌ����o(h��)ʿȫ�̅��c�����̼��ٿ���(f��)��Ƈ����g(sh��)��֪�R��ָ��(d��o)�ʳ�c��ӣ�ӛ����P(gu��n)����(f��)ָ��(bi��o)��
����1.2.2 �C���˽M���g(sh��)
����1.2.2.1 �����C�������g(sh��)ϵ�y(t��ng)���֣�ȫ����������ȡ�^���_�����Pλ(20°)���C������е��܇���ڻ����^��(c��)��ҕ�l��܇���ڻ��ߵ��҂�(c��)���_������վ�ڻ��ߵ����(c��)�������t(y��)�������x���g(sh��)�_�s3m��ęC���˿����_��
����1.2.2.2 ����Trocar���֣��������(��D1A)����Ě��ȡ�L�s1cmƤ�w�пڣ�����⸹ᘣ������⸹���⸹��������12~15mmHg��������12mmTrocar����C�����R�^�ס������(c��)�i���о�ƽĚ̎����12mmTrocar�������ֲ����o���ס��քe�����(c��)�i���о�ƽĚ�����(c��)Ҹǰ������2cm���҂�(c��)Ҹǰ������2cm����3ö8mmTrocar����C���˲�����е�ס�
����1.2.2.3 �ܰͽY(ji��)��ߣ�����(j��)��5���ձ���θ���ί�ָ�ϡ�[5]����D2�ܰͽY(ji��)��ߡ���������ѭ��־�����������“˹���”·�������_С�W(w��ng)Ĥ���ξ����i�ۊA���ɰ����̶��ڸξ����g�����w�⠿���̶��ҵ����K����¶�g(sh��)Ұ������W(w��ng)Ĥ�����ϸ����������ؙM�Y(ji��)�c�Ͼ���Ƣ���г���W(w��ng)Ĥ���ڽY(ji��)�cƢ�����xθ�W(w��ng)Ĥ��Ѫ�ܲ��x�࣬��ɵ�4sb�M�ܰͽY(ji��)��ߡ����ؽY(ji��)�c�Ͼ������г���W(w��ng)Ĥ�����xθ�W(w��ng)Ĥ��Ѫ�ܲ��x�࣬��ɵ�4d�M�ܰͽY(ji��)��ߣ��^�m(x��)��ʮ��ָ�c������ߣ�������T�µ�6�M�ܰͽY(ji��)��ߡ���θ�]С����(c��)��ʮ��ָ�c���x���㻯���x��θ��Ѫ�ܣ�������T�ϵ�5�M�ܰͽY(ji��)��ߡ��R��ֱ���и��]�����x��ʮ��ָ�c�������㻯θ����}���ο����}����ǻ���}���΄��}�����x��θ����}����ɵ�7��8a��9��12a�M�ܰͽY(ji��)��ߡ����_�����Ͼ���Ĥ���㻯Ƣ���}��Ƣ�TѪ�ܣ��x��θ����}����ɵ�11�M�ܰͽY(ji��)��ߡ��������҂�(c��)�����_���S�T�҂�(c��)���x����ɵ�1��3�M�ܰͽY(ji��)��ߡ���θ�����S�T���(c��)���x����θ��Ѫ�ܣ���ɵ�4sa�M�ܰͽY(ji��)��ߣ��^�m(x��)��ʳ�����(c��)��ߣ���ɵ�2�M�ܰͽY(ji��)��ߡ��R��ֱ���и��]�����x��ʳ������(bi��o)�������(bi��o)�����в����r������ǻ��
����1.2.2.4 �������ؽ�(UncutRoux-Y�Ǻ�)����ʳ�����c�Ǻ�(�˂�(c��)�Ǻ�)���x�Ãɸ�3-0����Թ̶����Y(ji��)�p��(���̾�)���L�Ȟ�30cm���������p�?bi��o)IJ��B�m(x��)�p�Ϸ����ʳ�����c�Ǻϡ���ʳ�����c�Ǻ�ǰ�������ʳ���ؿs����3-0�����տp����ʳ�����҃ɂ�(c��)�̶��������ǣ��M��ʹ��¶�ڸ�ǻ��ʳ�������L����1cm���ϣ��������Ǻϡ������Treitz�g��30~40cm̎���c�������ƽ�ʳ�����ˣ��õ�1�����̾���������{�����B�m(x��)�p�Ϲ̶�ʳ������c���c��ϵĤ�c�ڡ��p��g�������0.3~0.5cm���p�Ϲ̶��L���cʳ�����ஔ(d��ng)���ɣ�����ƽ����ʳ�����c�p�����_ʳ����ڣ��ҳ���ƽ����ʳ�����c�p�����_���c��ϵĤ���c�ڡ��õ�2�����̾���������ȫ���B�m(x��)�p��ʳ������о��c���c���о������ʳ�����c�пں���Ǻϡ��M(j��n)ᘷ�����(n��i)�M(j��n)��(n��i)��(ʳ����(n��i)��(c��)�M(j��n)ᘡ����c��(n��i)��(c��)���)���p���^���У�3̖�ۿɠ���ʳ�����˱�¶ʳ������о��������г�ʳ�������Ǻ�ᔣ���2�����̾��^�m(x��)��������ȫ���B�m(x��)�p��ʳ��ǰ�о��c���cǰ�о����p��ʳ�����c�ǺϿڕr�pᘷ���Ҫ�{(di��o)�������M(j��n)���(ʳ�����(c��)�M(j��n)ᘡ����c���(c��)���)���õ�1�����̾��������ҝ{�����B�m(x��)�p�ϰ����ǺϿ�ǰ�ڣ����B�m(x��)�����ǺϺ�ڣ����ʳ�����c�ǺϿ�1.5Ȧ�İ����p��4̖����ʳ�����c�ǺϿ���3cm�Y(ji��)��ݔ���ȣ��_��ʳ�{(j��ng)ݔ�����M(j��n)���h(yu��n)�˿��c���ڿ��c-���c�Ǻ�(��(c��)��(c��)�Ǻ�)���x�Ãɸ�3-0��ᘵ��̾����L�Ȟ�30cm���������p�?bi��o)IJ��B�m(x��)�p�Ϸ����ʳ�����c�Ǻϡ��xȡ��Treitz�g��15cm̎ݔ���ȵĿ��c�c��ʳ�����c�ǺϿ�40~50cm̎ݔ���ȵĿ��c�Ǻϡ����ɶ��c���ƽ����õ�3�����̾��ڝ{�����B�m(x��)�p�Ϲ̶����c-���c�c�ڡ��p��g�������0.3~0.5cm���p�Ϲ̶��L��1.5~2����С�c�������С�c�{���ӿp�Ϲ̶����ó����քe���_�ɂ�(c��)���c��ϵĤ���c�ڡ��õ�4�����̾����϶���ȫ���B�m(x��)�p�σɂ�(c��)���c�пں���ɿ��c-���c�ǺϿں�ڵ��Ǻϡ�
�������P(gu��n)֪�R���]���t(y��)�W(xu��)sciՓ���y�l(f��)���
�����p���M(j��n)ᘷ�����(n��i)�M(j��n)��(n��i)������4�����̾��^�m(x��)���¶���ȫ�ӿp�σɂ�(c��)���c�п�ǰ�������D(zhu��n)��p�Ͽ��c-���c�ǺϿ�ǰ�ڕrҪ�{(di��o)���p�������Ƀ�(n��i)�M(j��n)��(n��i)���{(di��o)�������M(j��n)���������ͬǰ�����õ�3�����̾����¶��ϝ{���Ӱ�����c�ǺϿڣ����^�m(x��)�p�����c���c�ǺϿں�ڣ���ɿ��c-���c�ǺϿ�1.5Ȧ�{���Ӱ�����əC�����¿p�Ϻ�Ŀ��c-���c�ǺϿڡ���ȫ�C������ȫθ�г����������ؽ��ꮅ(��D1)���ڐu����2�Mָ̎ȡ�L3~4cm�п��M(j��n)������(j��ng)�˿�ȡ����(bi��o)�������g(sh��)�Y(ji��)�����g(sh��)���пڲ�����D2��
����1.2.3 ��ǻ�R���g(sh��)����
������ǻ�R���g(sh��)���߲�ȡ�^���_�����Pλ(20°)�����ȷ��_��ҕ�l܇���ڻ����^��(c��)�������t(y��)��վ�ڻ������(c��)��һ��վ�ڻ����҂�(c��)�����R��վ�ڻ��߃���֮�g���ܰͽY(ji��)����^��ͬ�C�������g(sh��)�����ȫθ�г��Y(ji��)����ǻ�R���������ϸ�����ȡ�L12~15cm�п��M(j��n)����ȡ����(bi��o)�����z���(bi��o)�����������ؽ����w����ɣ�ʳ�����c�ǺϿڲ���25cm�����Ǻ�����ɶ˂�(c��)�Ǻϣ�������60cm�и��]�����]�ϡ����c-���c�Ǻ�Ҳ����25cm�����Ǻ�����ɶ˂�(c��)�Ǻϣ�60cm�и��]�����]�Ϛ��Ρ�3-0�����վ��{���Ӱ����ǺϿں�С�c���Ρ�����(j��)��Ҫ���ø�ǻ�����ܣ����c��е�������o�`�������P(gu��n)�����g(sh��)���пڷֲ���D3��
����1.2.4 �R���^��ָ��(bi��o)
������Ҫ�ռ����g(sh��)ָ��(bi��o)���g(sh��)��(f��)ָ��(bi��o)����(bi��o)���[���W(xu��)ָ��(bi��o)����(j��ng)��(j��)�W(xu��)ָ��(bi��o)���g(sh��)�l(f��)�Y�Ȕ�(sh��)��(j��)�����g(sh��)ָ��(bi��o)���������g(sh��)�r�g���������ؽ��r�g���g(sh��)�г�Ѫ�����п��L�ȡ��g(sh��)��(f��)ָ��(bi��o)�����״��Ś�r�g���״��´���ӕr�g���״��M(j��n)ʳ���|(zh��)�r�g����ʹ��ҕ�Xģ�M�u�ַ�(Visualanaloguescale��VAS)���g(sh��)��סԺ�r�g����(bi��o)���[���W(xu��)ָ��(bi��o)�����g(sh��)��T��N��TNM���ڣ��Լ��[��λ�á��ֻ��̶ȡ��[�����L�����@ȡ�ܰͽY(ji��)��(sh��)Ŀ������ܰͽY(ji��)��(sh��)Ŀ�������о���ȫ�ԡ���(j��ng)���}���ַ���r���g(sh��)�l(f��)�Y��Ҫӛ��пڸ�Ⱦ���ǺϿگ����ǺϿڳ�Ѫ���ǺϿڪMխ���g(sh��)���c���衢��Ӌ��30d��(n��i)�ٴ���Ժ�ʵ���r����(j��ng)��(j��)�W(xu��)ָ��(bi��o)��Ҫ����סԺ�M�á�
����1.2.5 �y(t��ng)Ӌ�W(xu��)����
�������Д�(sh��)��(j��)����SPSS23.0ܛ���M(j��n)�нy(t��ng)Ӌ�������������B(t��i)�ֲ���Ӌ���Y���Ծ���(sh��)±��(bi��o)��(zh��n)��(x±s)��ʾ������t�z��M(j��n)�в����;Ӌ��(sh��)�Y����������(sh��)����������χ2�z��M(j��n)�з�������P<0.05���нy(t��ng)Ӌ�W(xu��)���x��P<0.001�����@���y(t��ng)Ӌ�W(xu��)���x��
����2 �Y(ji��)��
����2.1�ɽM�������g(sh��)���g(sh��)��(f��)ָ��(bi��o)���^
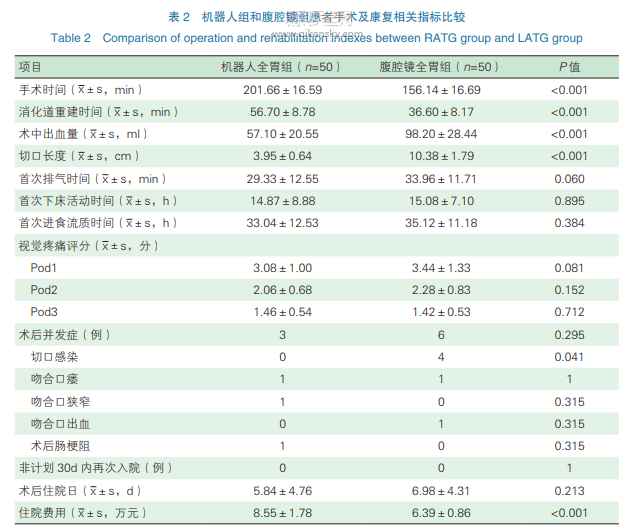
�����ɽM���߾����������g(sh��)��RATG�M�^LATG�M�g(sh��)�г�Ѫ���١��пڶ̣������g(sh��)�r�g�L���������ؽ��r�g�L���mȻLATG�M�����п��L�������g(sh��)��3d�r�ɽMVAS��ʹ�u�ֱ��^����o�y(t��ng)Ӌ�W(xu��)���x(P>0.05)���@���ܵ����ڼ��ٿ���(f��)��ƶ�ģʽ�(zh��n)ʹ����[6]����סԺ�M�÷��棬RATG�M���@����LATG�M(P<0.001)��RATG�M�cLATG�M���g(sh��)���״��Ś�r�g���״��´���ӕr�g���״��M(j��n)ʳ���|(zh��)�r�g�����o�y(t��ng)Ӌ�W(xu��)���x(P>0.05)��RATG�M�g(sh��)��סԺ�ն̣����ɽM��o�y(t��ng)Ӌ�W(xu��)���x(P>0.05��Ҋ��2)��
����2.2�g(sh��)�l(f��)�Y
�����ɽM���߾�δ���F(xi��n)���g(sh��)���P(gu��n)�������l(f��)�Y��RATG�M����3�����߳��F(xi��n)���l(f��)�Y(1���ǺϿگ���1���ǺϪMխ��1���g(sh��)���c����);�ǺϿگ����߽�(j��ng)�p�ܛ_ϴ���I�B(y��ng)֧���ί���Ȭ��;�g(sh��)���c���軼�߽�(j��ng)θ�c�p�����I�B(y��ng)֧���ί���Ȭ��;�ǺϿڪMխ�������g(sh��)��45d��(j��ng)��(n��i)�R�U(ku��)����Ȭ����LATG�M����6�����߳��F(xi��n)�g(sh��)�l(f��)�Y(1���ǺϿگ���1���ǺϿڳ�Ѫ��4���пڸ�Ⱦ);�ǺϿگ����߽�(j��ng)�ٴ����g(sh��)���p�ܛ_ϴ���I�B(y��ng)֧���ί���Ȭ��;�ǺϿڳ�Ѫ���߽�(j��ng)�����ί�Ȭ��;4���пڸ�Ⱦ���߷e�O�ӏ��Qˎ��Ȭ����LATG�M�пڸ�Ⱦ�^��(4��)��Ӱ푻��߳�Ժ����(d��o)���g(sh��)��סԺ�����L���ɽM���߷�Ӌ��30d��(n��i)�ٴ���Ժ�ʱ��^����o�y(t��ng)Ӌ�W(xu��)���x(P>0.05)��
����2.3�[���W(xu��)ָ��(bi��o)
�����ɽM�������g(sh��)��T��N��TNM���ڣ��Լ��[��λ�á��ֻ��̶ȡ��[�����L�����@ȡ�ܰͽY(ji��)��(sh��)Ŀ������ܰͽY(ji��)��(sh��)Ŀ�������о���ȫ�ԡ���(j��ng)���}���ַ��ȷ�����^����o�y(t��ng)Ӌ�W(xu��)���x(P>0.05��Ҋ��3)��
����3 ӑՓ
��������FDA����(zh��n)�_(d��)����C�������g(sh��)ϵ�y(t��ng)��(y��ng)�����R�����ж�ʮ���꣬�F(xi��n)���ڋD�ơ�������ơ�������ơ�����Ƶ��I(l��ng)��õ��V����(y��ng)��[7-10]����2002���ձ��W(xu��)��HashizumeM��[11]�״Έ���_(d��)����C����θ�������g(sh��)�_ʼ���䑪(y��ng)����θ�������g(sh��)�İ�ȫ�Բ���õ���C�����g(sh��)�m��(y��ng)�C�����،������g(sh��)����Ҳ�ڲ�����¡��҇��W(xu��)���_չ�_(d��)�������g(sh��)�C����ϵ�y(t��ng)θ���������g(sh��)��ʮ���࣬���Y(ji��)���l(f��)���˶�ƪ���P(gu��n)�о����¡�2014��������F(tu��n)ꠈ����120���C�����c394����ǻ�R���g(sh��)����Ԍ����о����Y(ji��)���@ʾ�_(d��)����C����θ�������g(sh��)��ȫ�����У��^��ǻ�R���g(sh��)���g(sh��)�г�Ѫ���١��ܰͽY(ji��)��߸��صס���(chu��ng)����С���g(sh��)��֏�(f��)����ȃ�(y��u)�ݣ�����3�������ʷ���o�[12]���������F(tu��n)꠰l(f��)�����P(gu��n)���_(d��)����C������ȫθ�г�Ƣ�T�ܰͽY(ji��)����Б�(y��ng)�õĈ��[13]�������Ľ�־�����ڷe�O̽����ȫ�C�����R���ֹ��p���������ؽ����g(sh��)�ļ��ɣ��M(j��n)һ���U(ku��)�����_(d��)����C�������g(sh��)ϵ�y(t��ng)��θ�������g(sh��)�еă�(y��u)�ݡ�ԓ���������_(d��)����C�������g(sh��)ϵ�y(t��ng)�Y(ji��)���p�?bi��o)IJ��B�m(x��)�p�Ϸ�����������ؽ��g(sh��)�����Ǻ��ؽ�������ȫ����Ч����Q����ȫ�C����θ�������g(sh��)���������ؽ����y�}[14]��
������ȫ�C�����ֹ��p���������ؽ�������5̎�P(gu��n)�I�c���ٳ�����ÙC���˵�3�ۣ��_(d��)����C����ϵ�y(t��ng)��4�l�Cе�ۣ�����1�l�R�^�ۺ�3�l��е�����ۣ��t(y��)��ֻ��ͬ�r�������е�����2�l��е�����ۡ����ԣ������R���ί������J(r��n)���3�۵����ò��ɱ����ã��D(zhu��n)����ه���ֵĠ�����¶[15]�����ϣ���(y��ng)������õ�3�۵Ġ������ñ�¶�g(sh��)Ұ���f(xi��)���R�¿p�ϲ�������3�۵ąf(xi��)ͬ�Ժͷ�(w��n)���Ծ������ֵ�ץ�QЧ����;���ǺϿp�����x���F(tu��n)����ڵ��R�����`���x����ͨ�Ŀ����տp�������B�m(x��)�p�ϵ��^���г��F(xi��n)�ǺϿ���ɢ��r���վo�p�����ֳ��F(xi��n)�ǺϿڪMխ���@�������Ǻϯ����ǺϿڪMխ�Ȳ��l(f��)�Y���L(f��ng)�U���R�����`�У����F(tu��n)꠰l(f��)�F(xi��n)�»�3-0���̾����m���ǺϿڿp�ϣ�ԓ�p���|(zh��)�g�����ǺϿ���֧�����ã����w�����^�࣬����Ч��ֹ��Ó�������Ǻ��y�ȵ�ͬ�r�_�����ǺϿڰ�ȫ;�ۿp�Ϸ����x���F(tu��n)꠲����p�?bi��o)IJ��B�m(x��)�p�Ϸ����܌��F(xi��n)�ǺϿڵ�ȫ�ӿp�ϼӝ{���Ӱ���(�p��)��ʹ�ǺϿڰ�ȫ�ο����˿p�Ϸ����ڶ˶ˡ��˂�(c��)�͂�(c��)��(c��)�Ǻ��ж��m��;���������ؽ��������x���F(tu��n)���ȫθ�г��g(sh��)�в���UncutRoux-Y�Ǻϣ��˷����Ȃ��y(t��ng)Roux-Y�������Σ����������������x�ࡣParisiA��[16]�Q�@�N�ؽ��������p�h(hu��n)�������H�ܺ����������E��߀�ܽ��̓�(n��i)�ްl(f��)����;���ǺϿ�λ���x��dz���Ҫ��ʳ�����c�ǺϿ��cTreitz�g���g�c�ܲ����^�̣���t�����ȽY(ji��)�c;Ҳ�����^�L����t�����M�c�ܣ����h������30~40cm��ʳ�����c�ǺϿھ���c���c�ǺϿ��g��ݔ�����c�ܾ��x������40~50cm�������������á���ݔ���Ⱦ��xʳ���ǺϿ�3cm̎���p��7-0�z���Y(ji��)���c�ܣ����ʳ��������ݔ���ȡ����g(sh��)���S�L��(f��)��θ�R�аl(f��)�F(xi��n)����1�����߳��F(xi��n)ݔ������ͨ�����o�R�����m�Y��l(f��)����
����ȫθ�г��g(sh��)����ȫ�C�����ֹ��p���������ؽ��ă�(y��u)�c�����M(j��n)һ���w�F(xi��n)��(chu��ng)�ă�(y��u)�ݡ��C�����o����ǻ�R�o��θ�������g(sh��)��Ҫȡ�ϸ����пڣ�ԓ�пڲ���С���e����ȫθ�г��Ļ��ߣ�ͨ����Ҫ�L�s10cm���пڲ������ʳ��������İ��b���Ǻϡ����F(tu��n)��R������������ؽ������¸�ȡ�L3~4cm�п�ȡ����(bi��o)����ɣ�����Ů�Ի��߿���ͨ�^ꎵ�ȡ����(bi��o)�������F(xi��n)�����o�o���пڣ��M(j��n)һ���w�F(xi��n)����(chu��ng)�ă�(y��u)��[17]���ڽ����ˌ��Ǻ�������ه�����g(sh��)�M�á��Ǻ����İl(f��)���������������ؽ����y�ȣ�������ȫ��ǻ�R��ʹ���Ǻ�������������ؽ��y�����^�M�ܿ�ͨ�^Orvil���������̷��ͺɰ��p�Ϸ����ʳ���˵�����ķ���[18]����������ȫ��ǻ�R���������ؽ��y�ȣ������������^��߀�DZ��^��(f��)�s�����y�����M(j��n)����е������ͨ��ȫθ�г��������ؽ�������Ҫ�ɰ�25cm�����Ǻ�������öǻ�R��60cm�и��]��ᔣ��M����13000Ԫ���ϡ�Ȼ��4�����̾��M�ò���3000Ԫ��һ���̶��Ͻ����˻��ߵ�סԺ�M�á��ۙC�����R���ֹ��p�Ϻ����������ա����J��[19]�����ȫθ�г��g(sh��)��ȫ��ǻ�R���ֹ��p���������ؽ��������g(sh��)���g(sh��)��ǻ�R�¿p�ϼ��g(sh��)Ҫ��ܸߣ���Ҫǻ�R�¿p���쾚������t(y��)����ɡ����g(sh��)�C���˾��о���(zh��n)���`���(w��n)������е���ڿpᘵ�ץȡ���M(j��n)��ᘽǶȿ��ƺʹ�Y(ji��)�ȷ���������@��(y��u)�ݣ��˽������R�¿p���ؽ����y�ȣ����ڳ��W(xu��)�����ա�ȫθ�г��g(sh��)����ȫ�C�����ֹ��p���������ؽ���ȱ�c���ٺĕr�L���mȻ���g(sh��)�C�����R�¿p�Ϻ��Σ������c�w���Ǻ����������ؽ��g(sh��)���^���ĕr��Ȼ���^�L����ˣ����F(tu��n)ꠇLԇ�ڿ��c���c�ǺϿڲ���60cmǻ�R�и��]������ɿ��c���c��(c��)��(c��)�Ǻϣ������R����3-0���̾��P(gu��n)�]��ͬ�_�ڲ��{���Ӱ����ǺϿڣ�һ���̶��Ͽs�����������ؽ��r�g����סԺ�M�øߡ��mȻ���õ��̾�����������ؽ��������M�ã������_(d��)����C�����_�C�M����е�IJ��M���^���F���������˻��ߵĽ�(j��ng)��(j��)ؓ(f��)��(d��n)���������a(ch��n)�C�������g(sh��)ϵ�y(t��ng)���Ց�(y��ng)�����R���У��������g(sh��)�C�����M�ñM��{���t(y��)�����N������
������ȫ�C�����ֹ��p���������ؽ��g(sh��)ʹ�_(d��)����C�������g(sh��)ϵ�y(t��ng)��θ�������g(sh��)�еă�(y��u)�ݵõ��M(j��n)һ��չʾ��ϣ���@һ��ʽ�����������t(y��)�����ջ���M(j��n)����ʹ����Ļ��߫@�档ͬ�r���ڴ��и���ǰհ���S�C�����о��_չ�����M(j��n)һ���C����ȫθ�г��g(sh��)���������ؽ���ʽ�İ�ȫ�Ժ̓�(y��u)�ݡ�——Փ�����ߣ��� ��1���� ��1���T�[��2�����A��1�������h1����־��1