�l(f��)���r(sh��)�g��2018-07-24���ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժҪ:��B��Ŀǰ�҇�(gu��)ʹ�ñ��^�ձ�ĎN�ڿәC(j��)�������һ�N���ڿ��cֲ�����I(y��)�϶���һ�������ڿ�����һ�w�C(j��)��ͨ�^(gu��)��(du��)ԓ�C(j��)�����ڿ��P����(sh��)�����P(gu��n)�о�����֪�����ڿ��P������׃����Ӱ�����������Ҫ���ء��\(y��n)��Pro/Eܛ����(du��)�ڿ�����һ�w�C(j��)���C(j��)�M(j��n)�����S���棬����(j��)��
����ժҪ:��B��Ŀǰ�҇�(gu��)ʹ�ñ��^�ձ�ĎN�ڿәC(j��)�������һ�N���ڿ��cֲ�����I(y��)�϶���һ�������ڿ�����һ�w�C(j��)��ͨ�^(gu��)��(du��)ԓ�C(j��)�����ڿ��P����(sh��)�����P(gu��n)�о�����֪�����ڿ��P������׃����Ӱ�����������Ҫ���ء��\(y��n)��Pro/Eܛ����(du��)�ڿ�����һ�w�C(j��)���C(j��)�M(j��n)�����S���棬����(j��)�(y��u)��ԭ�팦(du��)���C(j��)�M(j��n)�����\(y��n)��(d��ng)ģ�M�����Է�������ɞ����ڿ�����һ�w�C(j��)�ĸ��M(j��n)�ṩ������
�����P(gu��n)�I�~:�ڿ�����һ�w�C(j��);�����ڿ��P;����(sh��)����;����
�����ڿәC(j��)������͵��֘I(y��)���a(ch��n)�O(sh��)�䣬�L(zh��ng)�����I(y��)�ڐ��ӵ���Ȼ�h(hu��n)���У������ˆT��Ҫ�����^����w���ڄ�(d��ng)�������^����������(y��n)����(gu��)��(n��i)�ڿәC(j��)�Nܶ࣬�����ڿӺ����ֺ϶���һ�ęC(j��)е߀���٣���˹P�߇Lԇ�O(sh��)Ӌ(j��)��һ�N�ڿ�����һ�w�C(j��)��
�����҇�(gu��)Ŀǰ�ձ�ʹ�õ��ڿәC(j��)�БҒ졢���ᡢ���ߡ���ؓ(f��)4�N��ʽ������m�����r(n��ng)�ֵȻ��A(ch��)�ИI(y��)[1]��
����(1)�Ғ�ʽ�ڿәC(j��):�Ғ�ʽ�ڿәC(j��)�����@�^���C(j��)�ܡ��p����������(d��ng)�S���㲿���M��[2]���ڿ��@�^һ�������ʽ����(d��ng)��һ���������C(j��)�ṩ�������C(j��)��(g��u)ͨ�������c(di��n)�Ғ�ʽ�����˳�����ò���������C(j��)���ڿ�Ч�ʺ��ʣ��еđҒ��ڿәC(j��)���O(sh��)�Ѓɂ�(g��)��ɂ�(g��)���ϵ��@�^���Q����@�^ʽ�ڿәC(j��)���@�^�ڹ����r(sh��)�����ϵK���(hu��)ͨ�^(gu��)����(d��ng)�S�ϵ���Ƕʽ�x�����Ԅ�(d��ng)���x���Ķ������(d��ng)�����fʹ�@�^ֹͣ�\(y��n)��(d��ng)���Ա����@�^�ܓp���Ғ�ʽ�ڿәC(j��)�����ڿ�ֱ���ɱ��͡�����Ч�ʸߵ����c(di��n)���m���ڵ��α��^ƽ���ĵ^(q��)��
����(2)����ʽ�ڿәC(j��):����ʽ�ڿәC(j��)���ɲ����b�á��p�������@�^���l(f��)��(d��ng)�C(j��)���C(j��)�ܼ��x�������㲿���M��[3]���l(f��)��(d��ng)�C(j��)���ò��͙C(j��)���������ʽ�ڿәC(j��)�Ą�(d��ng)���b�á�����ʽ�ڿәC(j��)���@�^�ɵ�Ƭ���@�⡢�@�U�͌�(d��o)��Ƭ�M��[4]���ڿәC(j��)�Ĺ����@�^��Ť�غ��S�����������´�ֱ�����\(y��n)��(d��ng)�������µ������t�،�(d��o)��Ƭ�������\(y��n)�����ر����ŵ�����[5]������ʽ�ڿәC(j��)�����ڿ�Ч�ʸߡ��w�eС���|(zh��)���p�����ڲ�ж�����c(di��n)�����Ɇ��˻��p�˲������m���ڵ��α��^��(f��)�s��ɽ�ء����꼰���ֵ^(q��)������ʽ�ڿәC(j��)���҇�(gu��)ʹ�õı��^�ձ�[6]��
����(3)����ʽ�ڿәC(j��):����ʽ�ڿәC(j��)���������C(j��)���(d��ng)�����܉�?q��)��F(xi��n)�������ߵ�һ�N�r(n��ng)���ڿәC(j��)�����В�ӡ�����(d��ng)���㣬�w�eС��ͨ���Ժü�����Ч�ʸߵ����c(di��n)�����ڿӳɱ��^�ߡ�����ʽ�ڿәC(j��)���(q��)��(d��ng)��ʽ��Ҫ�֙C(j��)е�cҺ���ɷN[7]������ɽ��ʡ�r(n��ng)�C(j��)�о����аl(f��)��3WY-40ʽ�ڿәC(j��)�������߷�ʽ��Һ��ʽ݆̥�c�ڿәC(j��)�������ߙC(j��)��(g��u)��Y(ji��)�ϵķ�ʽ�����Ҿ��Ъ�(d��)���������_���܉��ڲ�ͬ���ε���r�²�������(y��ng)�����߷�ʽ[8]��
����(4)��ؓ(f��)ʽ�ڿәC(j��):��ؓ(f��)ʽ�ڿәC(j��)�m���چ��˲����������w�eС�����ڔy����������������c(di��n)���m����ɽ�ء����꼰ƽ���؎����ڿ����I(y��)��ԓ�ڿәC(j��)�����M(j��n)�п���200mm���µ��ھ�����ͨ�����ڸ��Nֲ����������I(y��)����ؓ(f��)ʽ�ڿәC(j��)���ڿӷ�ʽ�c����ʽ��ͬ[9]�����˱��o(h��)�@�U����ؓ(f��)ʽ�ڿәC(j��)���@�^��߀�����@�U�ͷ��o(h��)�֡��@�^��һ��߀�b�����D(zhu��n)�C(j��)��(g��u)�Դ_���������ų����⡣�ڰl(f��)��(d��ng)�C(j��)��λ����߀�b�з�����Է�ֹ�ڿәC(j��)���(d��ng)�������ˆT�ڲ�����ؓ(f��)ʽ�ڿәC(j��)�r(sh��)����䌣�õķ����o(h��)�ߡ�
��������4�N��Ҋ(ji��n)���ڿәC(j��)������ʽ�͑Ғ�ʽ���҇�(gu��)��(y��ng)�õı��^�ձ�[10]�����@Щ���y(t��ng)���ڿәC(j��)ͨ���Dz���Ȼ���Ƶķ�ʽ�M(j��n)���O(sh��)Ӌ(j��)�ģ����ںܴ��äĿ�ԺͲ�������[11]��
����1�ڿ�����һ�w�C(j��)���O(sh��)Ӌ(j��)˼·
��������ʹ�ڿәC(j��)�����ˆT���ֳ�����w�����䐂�����飬��(y��ng)ͨ�^(gu��)�C(j��)е������ֶ�(l��i)�����ڿәC(j��)�����(d��ng)������ʹ�����pС��ͬ�r(sh��)߀Ҫ�p�p�ڿәC(j��)���|(zh��)��������@�^��������������[12]��
�����ڼ��g(sh��)��(chu��ng)�·��挢�ڿ��cֲ�繤��һ�w�����ڿәC(j��)���ڿӹ�����ɵ�ͬ�r(sh��)Ѹ���ГQ�����P����(zh��)�ЙC(j��)��(g��u)�ٌ���(zh��n)��õĘ���ֲ�������ɷNֲ�������@һ���M(j��n)Ҳ�LJ�(gu��)��(n��i)��һֱŬ�����о�����ͨ�^(gu��)��(du��)��(gu��)��(n��i)�������ڿәC(j��)������Nֲ��ʽ���о��������@�N���M(j��n)����Փ���ǿ��еġ�
�����c�F(xi��n)�еļ��g(sh��)��ȣ�ԓ�ڿ�����һ�w�C(j��)�Ą�(chu��ng)��֮̎���ڼ��ڿ�ֲ��ȶ�N������һ�w�������w�ϴ���ȵ�������ֲ���O(sh��)��Ĺ��ã��Ķ�����˽�(j��ng)��(j��)Ч�档������ʽ�ڿӲ����c�C(j��)е�ֲ����M������(l��i)���������Է�ֹ�����ڿ��P�c�C(j��)е�������w�Y(ji��)��(g��u)�л���Ӱ푣�����߀����ֲ���O(sh��)��Ĺ������p�p��ֲ���b�õ��|(zh��)�����O��ط������O(sh��)����\(y��n)�У��Ķ�����˹���Ч���c�O(sh��)�������ʡ��@�N�M����������ʽ�ڿ��P�͙C(j��)е�ֵķ�ʽ����ʹ�O(sh��)������w�������@��(y��u)�ڶ������ܵĺ�(ji��n)����ӣ��Ķ�������O(sh��)��ľC��������
�����ڿ�����һ�w�C(j��)ͨ�^(gu��)�\(y��n)�d�b���\(y��n)����ָ�����c(di��n)���ڿɻ��D(zhu��n)ʽ�����C(j��)��(g��u)���(q��)��(d��ng)�ڿ�ֲ���b��Һ���R�_(d��)�IJٿ��£��{(di��o)������ʽ�ڿ��P��λ�ã�ʹ�ڿ��P��ֱ���ӽ����棬�(q��)��(d��ng)����ʽ�ڿ��PҺ���R�_(d��)����(d��ng)�����ڿ��P���D(zhu��n)�������ڿ���ָ�����60cm��ͣ��20s���������\(y��n)��(d��ng)���x�_����ĺ��mλ�ã�ʹ�(q��)��(d��ng)����ʽ�ڿ��PҺ���R�_(d��)ͣ�D(zhu��n)���ڿ����I(y��)�Y(ji��)����
�����ڿ�ֲ���b����Һ���R�_(d��)�(q��)��(d��ng)���D(zhu��n)һ���Ƕȣ�ʹ�C(j��)е������λ�ڹ���λ�ã�Ȼ��ɻ��D(zhu��n)ʽ�����C(j��)��(g��u)��ͨ�^(gu��)�(q��)��(d��ng)���D(zhu��n)�_(t��i)Һ���R�_(d��)���D(zhu��n)���ƙC(j��)е�ֵ�����Ĵ惦(ch��)�^(q��)�C(j��)е�ֻ����U���_ץȡ�������ͨ�^(gu��)�����C(j��)��(g��u)���D(zhu��n)���������D(zhu��n)������Ϸ��������C(j��)��(g��u)�{(di��o)����צ�ĽǶ�ʹ���紹ֱ�������÷����ںõĘ�Ӄ�(n��i)���������(g��)�ڿ�ֲ�繤����
����2�ڿ�����һ�w�C(j��)�ڿ��P����(sh��)�о�
�����ڿ�����һ�w�C(j��)���������ڿ��P�r(sh��)����(y��ng)���]�ڿӹ����r(sh��)�����ڿ��P���������@�U�c�������|���a(ch��n)���ĸ��N�������@Щ������(hu��)��(du��)�����ڿ��P�a(ch��n)���S������Ť�أ�ԓŤ�ؕ�(hu��)�S���ڿ���ȡ������ɷ���ͼ�����ȗl���ȵIJ�ͬ����ͬ;����ԓ�����ڹ����^(gu��)����һֱ���ڣ��䌦(du��)�ɻ��D(zhu��n)ʽ�����C(j��)��(g��u)�����ܼ�������(hu��)�a(ch��n)������Ӱ�;���⣬�����ڿ��P�ĽY(ji��)��(g��u)����������(sh��)��(du��)�����^(gu��)���еķ�������Ҳ�кܴ�Ӱ�[13]���@���O(sh��)Ӌ(j��)�������ڿ�����һ�w�C(j��)��Ҫ����ֲ�����֡��ڿ���U�����I(y��)�����Ҫ�������ڿ��P�ڹ����^(gu��)���в��HҪ�M������Ҫ��ͬ�r(sh��)߀Ҫ�����������|(zh��)�Ĺ��ܡ�
���������ڿ��P�ĽY(ji��)��(g��u)�����܅���(sh��)��(du��)�ڿ��P��ֱ�������ܵ�������Ť��Ӱ��^��ֻ��ͨ�^(gu��)��(du��)�����ڿ��P���օ���(sh��)�M(j��n)�о��w����Ӌ(j��)�㣬���ܵó����ܵ��@Щ���cŤ��֮�g���P(gu��n)ϵ��Ӱ푳̶ȡ�
����2.1׃��(d��o)���F������������(sh��)�W(xu��)ģ��
����ֻ�Ю�(d��ng)“�R���@��”≤����ʽ�ڿ��P�����D(zhu��n)�ٶȕr(sh��)�������������ܿ˷����P(gu��n)�ķ������������\(y��n)�����⣬��������ʽ�ڿ��P�~Ƭ���\(y��n)�������r(sh��)����Ҫ���¶�����u׃�����Q֮��׃��(d��o)���������\(y��n)�������r(sh��)��(du��)����ʽ�ڿ��P�Ę�(g��u)�켰�������~Ƭ���ΑB(t��i)Ҳ�����P(gu��n)Ҫ�����M(j��n)�в��g���и����I(y��)�r(sh��)�����ڿ��P�������Ƕ�Ҫ���ֲ�׃����������ʽ�ڿ��P�~Ƭ���ΑB(t��i)�豣�C����������һ�c(di��n)�ķ����������ڿ��P�����ľ��A��δ≤90°-Φ��Φ���ڿ��P�~Ƭ�c������Ħ���ǡ�
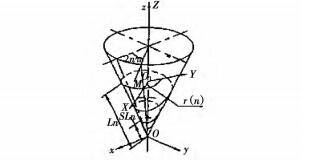
����(1)׃��(d��o)���F���������γɼ�����(sh��)���̡�׃��(d��o)�̈A�F��������D1��ʾ
����
����
����׃��(d��o)���F�����\(y��n)��(d��ng)�������ڿ��P�ڹ����^(gu��)���е�һ�N��(f��)���\(y��n)��(d��ng)���䌍(sh��)�HӋ(j��)��ʮ�֏�(f��)�s�����˱��ڷ����о������Ƚ���һ��(g��)���ڿ��P���������S��oz�S�Ŀ��g����(bi��o)ϵoxyz��Ȼ���ٽ���һ��(g��)��(d��ng)��ʽ��:SL0���ʼλ��(n=0)�r(sh��)M�c(di��n)��˲�r(sh��)��(d��o)��;n���D(zhu��n)��(d��ng)��Ȧ��(sh��);aL���(d��ng)ֱ��L�ļ��ٶȡ�
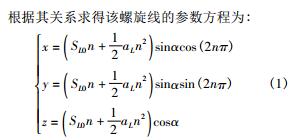
����(2)׃��(d��o)���F��������γɼ�����(sh��)���̡�׃��(d��o)���F��������D2��ʾ
����
����MN���\(y��n)��(d��ng)܉�E���γɵ����漴��׃��(d��o)���F�������档ͨ�^(gu��)�ƌ�(d��o)�ɵó������׃��(d��o)���F������ą���(sh��)���̞�:
����
����2.2׃��(d��o)���F�������@�^�ą���(sh��)����ģ
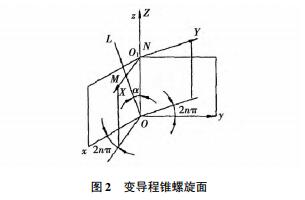
����ͨ�^(gu��)Pro/E���Sܛ���M(j��n)�Ѕ���(sh��)��ģ����������ʽ�ڿ��P���P(gu��n)�I���֞������Y(ji��)��(g��u)�����������Ȍ�(du��)�ڿ��P���~Ƭ�M(j��n)�Ѕ���(sh��)�����S��ģ���\(y��n)��Pro/E���Sܛ���е��������蹦�ܵõ�����������ڿ��P�~Ƭ���ֵĽY(ji��)��(g��u)�����ȏ�����D�����M(j��n)�뵽���L���棬Ȼ���x�����(zh��n)����ݔ������������Sn=S1+a(n+1)�����ͨ�^(gu��)���������x�(xi��ng)�õ���������Sģ�ͣ�׃��(d��o)�������F�潨ģ�D��D3��ʾ��
����
�����ڿ�����һ�w�C(j��)���I(y��)�r(sh��)ͨ���������ڿ��P���������m��(d��ng)�������P��ˣ��@�Ӳ�������ʹ�����ڿ��P�܉��������@�������У�����߀����ʹ�������I(y��)׃�ø��������
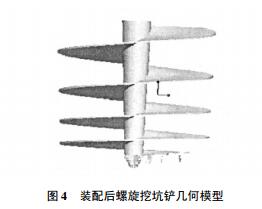
�����P�X�X��Ŀ��g����(bi��o)������(g��)����ĊA�ǛQ���������ڿ��P�P�X�ľ��wλ�á����ڱ����о�������ʽ�ڿ��Pͨ������ֲ�����ּ��ڿӻ���ȷ��棬�����ڿ��P�L(zh��ng)����������(du��)��ܛ�������h(hu��n)�������I(y��)���ڌ�(sh��)�H�����r(sh��)�ڿ��P���������cĥ�p�ij̶ȶ���̫������ڿ��]�P��λ�úͽǶȕr(sh��)ֻ�迼�]�ڿ��P�����c�����ɂ�(g��)���ɣ��b���������ڿ��P��ģ����D4��ʾ��
����
����2.3�R���@�ٴ_��
����ͨ�^(gu��)�о�������֪��ֻ�д_�������ڿ��P���R���D(zhu��n)�ٲ��܉������(sh��)�F(xi��n)�������\(y��n)�ͣ���������ڿ��P���D(zhu��n)�ٵ���ԓ�ٶȄt��(hu��)��(d��o)�����������ڿ��P���~Ƭ�Ķ�ʹ�����\(y��n)��ʧ��[14]��Ҫ��(du��)ԓ�R���D(zhu��n)���M(j��n)�д_��������Ҫ��(du��)�����\(y��n)��Ҏ(gu��)�ɺ����������ȅ���(sh��)�M(j��n)�з�����
����(1)�����ڿ��P�~Ƭ�������ֲ���������(sh��)��������ʽ�ڿ��P�P�M(j��n)�^(gu��)���У��ڿ��P�~Ƭ�ϵ����������x���������Ì��Ƀ�(n��i)�����\(y��n)��(d��ng)���Ķ�ʹ�~Ƭ�ϵ����Ӻ�ȳɞ�Ҏ(gu��)�t����������С��Ԫ�w������������D5��ʾ��
����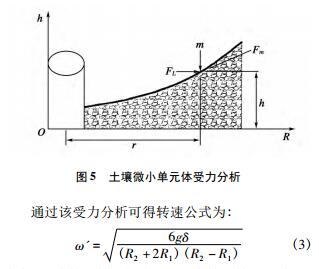
����ʽ��:R1���ڿ��Pо�Uֱ��;R2���ڿ��P�⾉ֱ��;δ�������\(y��n)�͕r(sh��)�ĺ�ȡ�ʽ(3)����δ�c�����ڿ��P���ٶȳ����ȡ�
����(2)ݔ���^(gu��)�������������������������S�������ڿ��P�~Ƭ���D(zhu��n)��(d��ng)���ܵ������x����FL������G�����NĦ���������á�����С��Ԫ�wݔ���^(gu��)������������D6��ʾ��
����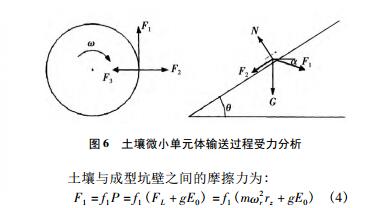
����ʽ��:f1�������Ϳӱڵ�Ħ��ϵ��(sh��);P����Ϳӱڌ�(du��)�����ķ�������;FL���x��������;E0���������(c��)����;m�������|(zh��)��;ωr�������D(zhu��n)��;rz�������ֲ�������λ�õİ돽�������c�����ڿ��P�~Ƭ֮�g��Ħ������:F2=f2N=f2[mgcosθ+F1sin(α+θ)](5)ʽ��:f2�������c�~Ƭ��ֱ��Ħ��ϵ��(sh��);θ����S��r̎����������;α���D(zhu��n)�ٸ����R��ֵ�r(sh��)Ħ����F1�����׃�a(ch��n)���ĊA�ǡ�(3)�����ڿ��P�~Ƭ���R���D(zhu��n)���ƌ�(d��o)�������c�����ڿ��P�~Ƭ֮�g������(du��)�D(zhu��n)��:ωN=ω-ωr=Kωr(6)ʽ��:K�鳣��(sh��)��һ��ȡKֵ��0.2��0.3;ωr�������D(zhu��n)�١�
����ͨ�^(gu��)��(du��)�ڿ�����һ�w�C(j��)�����r(sh��)���ܴ��ڵ����d���Լ������ڿ��P�������M(j��n)�Ѕ���(sh��)�_�����õ�׃��(d��o)��������Ļ����㷨�Լ��R���D(zhu��n)�ٴ_���Ļ������������������ڿ��P�\(y��n)��(d��ng)�^(gu��)��������׃��������������ҪӰ����ء�
����3�ڿ�����һ�w�C(j��)��ģ�M�����о�
����3.1Pro/Eܛ��ģ�M������������Pro/Eܛ���M(j��n)���ڿ�����һ�w�C(j��)ģ�M����ľ��w��������:
����(1)����(j��)�O(sh��)Ӌ(j��)�����P(gu��n)Ҫ���L�Ƴ������Һ������(d��ng)�C(j��)��(g��u)��(ji��n)�D��
����(2)�L������D����ɺ���ͨ�^(gu��)�b��ģʽ��ɸ�����������B�ӡ�
����(3)�z�����λ�B�Ӝ�(zh��n)�_�ɹ����O(sh��)�����P(gu��n)�\(y��n)��(d��ng)�ij�ʼ�l�������|(zh��)�����ԣ����x�ŷ�늙C(j��)�ȡ�
����(4)����ģ�ͣ�����λ�á��\(y��n)��(d��ng)�����ȷ���ķ�����ȡ�÷����Y(ji��)����
����3.2�ڿ�����һ�w�C(j��)ģ�M����
���������ڿ�����һ�w�C(j��)���Sģ�ͣ�����һ�w�C(j��)���\(y��n)��(d��ng)�������O(sh��)Ӌ(j��)��һ�w�C(j��)�Ʉ�(d��ng)���C(j��)��(g��u)���ɻ��D(zhu��n)ʽ�����C(j��)��(g��u)���C(j��)�ܡ������ڿӈ�(zh��)�ЙC(j��)��(g��u)�Ȳ��ֽM�ɡ������ڿ�����һ�w�C(j��)���Sģ����D7��ʾ��
����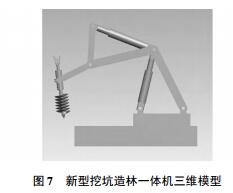
�����\(y��n)��Pro/E���Sܛ����(du��)һ�w�C(j��)�M(j��n)�������P(gu��n)���������ͨ�^(gu��)����ģ�M���@�N�����ڿ�����һ�w�C(j��)�Č�(sh��)�H������r����ɞ������P(gu��n)�a(ch��n)Ʒ���аl(f��)�ṩ�Y(ji��)��(g��u)���\(y��n)��(d��ng)�����ȷ���ą�����(sh��)��(j��)��
���������īI(xi��n):
����[1]���������촺���������ܣ���.���̙C(j��)е����ʹ��ֲ���ڿәC(j��)���g(sh��)�о�[J].�C(j��)е�����c�Ԅ�(d��ng)����2014(1):192-195.
����[2]�����ᣬ�O����.�p���ڿәC(j��)�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)[J].�r(n��ng)�C(j��)���о���2011(7):162-163.
����[3]ͯ�c�x.�ڿәC(j��)����ʹ��Ч������[J].�֘I(y��)�C(j��)е�cľ���O(sh��)�䣬2011(9):31-33.
����[4]�w���ɣ��R���ѣ������n.����ANSYS�đҒ�ʽ�ڿәC(j��)�@�^�o���W(xu��)����[J].�r(n��ng)�C(j��)���о���2010(6):87-89.
����[5]���_ᓣ�������������.MS310�Ͷ�ܹ��@���I(y��)�C(j��)�ڿӲ����ĽY(ji��)��(g��u)�O(sh��)Ӌ(j��)[J].�½��r(n��ng)�C(j��)����2012(2):14-16.
����[6]���x�ƣ�����.Մ��(gu��)��(n��i)���˹��֓����C(j��)е�ĬF(xi��n)��l(f��)չڅ��(sh��)[J].ɭ�ֹ��̣�2006(3):12-14.
����[7]�ڽ���(gu��)�����\�l(w��i).��(gu��)��(n��i)���ڿәC(j��)���о��F(xi��n)��l(f��)չڅ��(sh��)[J].�r(n��ng)�C(j��)���о���2006(12):38-41.
����[8]��V�������(gu��)�٣������A.��(gu��)��(n��i)���֙C(j��)е���l(f��)չǰ��[J].�֘I(y��)�C(j��)е�cľ���O(sh��)�䣬2003(11):4-5.
����[9]�S��������ӡ���f������.����ʽֲ���ڿәC(j��)�Ĺ���ԭ�����Y(ji��)��(g��u)����[J].�r(n��ng)�C(j��)���о���2013(2):35-39.
����[10]����������.�\���֘I(y��)���B(t��i)���O(sh��)�c�l(f��)չ[J].�����c���(hu��)��2013(8):259-259.
����[11]����ӡ.�����ڿәC(j��)������Ԫ������̓�M�әC(j��)����[D].�ό�:�V����W(xu��)��2012.
����[12]���ٺ�.�ڿәC(j��)���x���cʹ��[J].�r(n��ng)�I(y��)�C(j��)е��2002(2):51-51.
����[13]���t�r.�����@�C(j��)���I(y��)�b�õĄ�(d��ng)���W(xu��)����[J].��·�C(j��)е�cʩ���C(j��)е����2011(12):75-76.
����[14]HongJialin��PavelTalalay��MikhailSysoev.Optimizationoficecuttingstransportationbycable-suspendedcoreaugerdrills[J].GlobalGeology��2014(1):48-54.