�l(f��)���r(sh��)�g��2022-03-03���ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժҪ: Ŀǰ�����΄�(w��)��������һЩΣ�U(xi��n)�^(q��)��·�r��(f��)�s���C(j��)���˲ɼ���Ϣ��y�����a(ch��n)���ɔ_; ᘌ�(du��)�@һ��(w��n)�}���O(sh��)Ӌ(j��)����o(w��)�E���ӞV������Ϣ�ں�˼�뵽�����C(j��)���˵��O(sh��)Ӌ(j��)�У��о��F(xi��n)�еij����C(j��)���˵�ȱ�ݣ���(y��u)���O(sh��)Ӌ(j��)��һ�N�����C(j��)���˵ı��w�Y(ji��)��(g��u)����(y��u)���˸��N�ǽ��|ʽ�������IJ���
����ժҪ: Ŀǰ�����΄�(w��)��������һЩΣ�U(xi��n)�^(q��)��·�r��(f��)�s���C(j��)���˲ɼ���Ϣ��y�����a(ch��n)���ɔ_; ᘌ�(du��)�@һ��(w��n)�}���O(sh��)Ӌ(j��)����o(w��)�E���ӞV������Ϣ�ں�˼�뵽�����C(j��)���˵��O(sh��)Ӌ(j��)�У��о��F(xi��n)�еij����C(j��)���˵�ȱ�ݣ���(y��u)���O(sh��)Ӌ(j��)��һ�N�����C(j��)���˵ı��w�Y(ji��)��(g��u)����(y��u)���˸��N�ǽ��|ʽ�������IJ��ֽY(ji��)��(g��u)��������ṩ����Ĕ�(sh��)��(j��)��(l��i)Դ; �O(sh��)Ӌ(j��)�˟o(w��)�E�V������Ϣ�ںϼ��g(sh��)����Q�����ⲿ��(f��)�s�h(hu��n)����ij��������Ϣ���ڵ���Ϣ�ɔ_; ���Ϻ�ij������Ϣ��˾�ij����C(j��)�����M(j��n)�Ќ�(sh��)�H�Ĝy(c��)ԇ����(sh��)�(y��n)���������C(j��)���ˡ�YJV22 - 3* 300 ��|���䏝��ֱ����2. 5 m��ʹ��ʯ��ģ�M�ĸ���������ȣ���(du��)��(sh��)�(y��n)�Ђ������ɼ��Ĕ�(sh��)��(j��)��(j��ng)�^(gu��)��(sh��)��(j��)�A(y��)̎����ʹ�� Matlab 7. 0 ��(du��)���M(j��n)�М�(zh��n)�_�ʷ��棬����Y(ji��)���������@�N�����C(j��)���˵ı��Ϝ�(zh��n)�_�ʸ��_(d��) 96. 3% ���ڂ������p�ĺ�ģ�ͻ֏�(f��)���ӕr(sh��)�����^(gu��) 3 s���Y(ji��)��(g��u)��(y��u)�����@��
�����P(gu��n)�I�~: �����C(j��)����; ��Ϣ�ں�; �o(w��)�E���ӞV��
����0 ����
����ݔ늾�·������늾W(w��ng)�ܵ���Ȼ��(z��i)���ij�Ҋ(ji��n)��ʽ���@�N��(z��i)�������������l�����U������eͣ늵ȱ���(z��i)�¹ʣ��o늾W(w��ng)�İ�ȫ�\(y��n)���c�˂����ճ������(l��i)��Σ������Щ�꣬�҇�(gu��)��ݔ늾�·�ܵ��ı�ѩ��(z��i)�������^�ࡣ�ڱ������ݔ늾�·��ȫ��(w��n)���\(y��n)�е��^(gu��)����߀���ܴ���ʹ�Ì��T�ij����b�ã�����ʹ���˹������ķ�ʽ�ڱ�ѩ�h(hu��n)���³������@�ӵķ�ʽЧ�ʵ��£�ͬ�r(sh��)��(du��)������˵�������ȫ����(l��i)�����{�������͵�ݔ늾�·�����C(j��)�������ڟo(w��)�˿��Ƶ���r�������M(j��n)�^(gu��)�������ܵر��_(k��i)ǰ�����ϵK�^(q��)���@Щ�ϵK������^���ӡ������N�ȸ��N������������ǰ�M(j��n)���^(gu��)����ɳ������I(y��)����Щ�꣬�҇�(gu��)�ڳ����C(j��)���˵��о��I(l��ng)��չ�_(k��i)�˴������о��������о����c��УͶ���˾�ľ����M(j��n)�г����C(j��)���˵����ƣ�Ҳ���F(xi��n)�˺ܶ���(y��u)����о��ɹ�[1 - 3]��
����1 �o(w��)�E���ӞV������Ϣ�ں��㷨��B
��������ʹ���˟o(w��)�E���ӞV������Ϣ�ںϼ��g(sh��)��(du��)�����C(j��)����[4 - 6]�M(j��n)�Ѓ�(y��u)�����@�N��Ϣ�ںϼ��g(sh��)���ԏĸ������@�_(k��i)ϵ�y(t��ng)���Ի��Ć�(w��n)�}�����O(sh��)�����C(j��)���˵���Ϣ�ںϕr(sh��)�漰�ĸɔ_��
������Ϣ�ڲ���IJɼ��^(gu��)���У���(j��ng)�^(gu��)�o(w��)�E���Ӹ��V�������a(ch��n)��������Ϣ��������ͨ�^(gu��)������Ϣ��(du��)늙C(j��)�c�������M(j��n)���(q��)��(d��ng)��������ǰ�\(y��n)��(d��ng)��ɳ���������
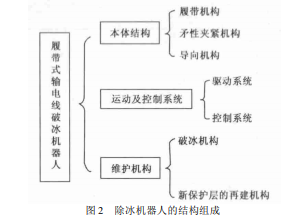
����2 �����C(j��)���˿��w�O(sh��)Ӌ(j��)
����2. 1 �C(j��)���˵ęC(j��)е�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)
�����Ƅ�(d��ng)�����C(j��)���˵Ŀ��w�O(sh��)Ӌ(j��)�������w�Y(ji��)��(g��u)���\(y��n)��(d��ng)����ϵ�y(t��ng)��ȥ���C(j��)��(g��u)�� 3 ��(g��)���֡����w�C(j��)��(g��u)�dz����C(j��)���˵����w�Y(ji��)��(g��u)���֣������C(j��)����ǰ�M(j��n)���Ď��Y(ji��)��(g��u)���cݔ늾�������?sh��)A�o�C(j��)��(g��u)�����еČ�(d��o)��C(j��)��(g��u)�������ڳ����C(j��)���˵����M(j��n)��ʹ�������zʽ���Ď��Y(ji��)��(g��u)�����C���M(j��n)���cݔ늾����^��Ľ��|��e�cĦ�������Ե����z���Ա��Cݔ늾��ı��治���ܵ��p�ģ��A�o�C(j��)��(g��u)ʹ�Ď��C(j��)���ˌ�(du��)ݔ늾���ֱ���кܺõ��m��(y��ng)�ԡ�����ϵ�y(t��ng)���Ԍ�(sh��)�F(xi��n)�dz����C(j��)���˵�ǰ�M(j��n)�c��ͣ�l(f��)��ָ���(sh��)�F(xi��n)ݔ늾����Ʊ������Ќ�(d��o)��C(j��)��(g��u)�܉�?q��)��F(xi��n)�Ʊ����ܣ�߀���Ԍ�(sh��)�F(xi��n)��(du��)���|�ľS�o(h��)�����w�ęC(j��)���˵Ĺ��܄��֞�:
����2. 2 �C(j��)�����Ď���λ��Ӳ����(y��u)���O(sh��)Ӌ(j��)
���������C(j��)���������M(j��n)���Ʊ����������ٶ�Ҫ���{(di��o)�����е��ٶ�Ҫ����(j��)�����ĺ���M(j��n)���{(di��o)���������ЙC(j��)���˵ı��w�O(sh��)Ӌ(j��)�r(sh��)�����ܳ���Ҫ������: �����ٶ� v < 5m/min ����������¶� θ > 60o ���Ʊ����D(zhu��n)�� t = 300 r/min ���C(j��)�������� m < 25 kg�������O(sh��)Ӌ(j��)�����M(j��n)�C(j��)������ʹ��ݔ늾����^(gu��)����(c��)���Ď����O(sh��)Ӌ(j��)�������w�ĽY(ji��)��(g��u)��(du��)ݔ늾�·�@�ȵ�׃�������m��(y��ng)����D 3 ��ʾ�������wʹ�Ï��ԙC(j��)��(g��u)�M(j��n)���B�ӣ��Ď��Y(ji��)��(g��u)����֧�ܡ����µ��Ď����Ď����(q��)��(d��ng)늙C(j��)���O(sh��)�䣬ͨ�^(gu��)�װ�ʹ�ÊA�o�C(j��)��(g��u)�A�o�����µ�ݔ늾��ϣ���(d��o)��C(j��)��(g��u)�O(sh��)�õĵװ��ǰ���c�����ĵij����C(j��)���˰�����һ�Ď��Y(ji��)��(g��u)�c�ڶ��Ď��Y(ji��)��(g��u)�ɂ�(g��)���֣����w�������z�Ď����(q��)��(d��ng)݆�c����(d��ng)�S�D(zhu��n)��(d��ng)������(d��ng)�S�c�(q��)��(d��ng)݆�̶��B�ӣ��Ď����(q��)��(d��ng)�¹������ɂ�(g��)���o݆���Ա��C�Ď��cݔ늾�֮�g���Ӿo�ۣ������˙C(j��)���˵��������������C�����C(j��)�������Ď��а�ȫ��(w��n)��������������?sh��)A�o�C(j��)��(g��u)��ݔ늾��ęC(j��)���˵����g��λ���^(gu��)������(c��)�ĵ�һ���ڶ��Ď��A�o��ݔ늾�����(sh��)�F(xi��n)���У��@�N�Y(ji��)��(g��u)����������m��(y��ng)��ֱͬ����ݔ늾������C��ݔ늾������з�(w��n)��:
����2. 3 ����ģ�K�O(sh��)Ӌ(j��)
������?y��n)���ݔ늾�·������������������ӣ����˷�ֹ�U���������࣬�����C(j��)���˵��O(sh��)Ӌ(j��)��(y��ng)ԓ�M�����C�p�㣬���ڔy���������C(j��)����߀��횾��к�(qi��ng)�����ܱ��������������C(j��)���˵Ĺ����h(hu��n)����·��������·��һЩ���B���������N���^���Ӵ����Ҵ���λ�Ƅ�(d��ng)·�����ϵK������C(j��)���˵Ĺ����h(hu��n)�����Կ��Y(ji��)�鏊(qi��ng)늴ň�(ch��ng)����Y(ji��)��(g��u)������(qi��ng)늴ň�(ch��ng)��ָ�C(j��)�����\(y��n)�еĭh(hu��n)����·��̎��һ�N����\(y��n)�еľ�·�У���Y(ji��)��(g��u)���ĭh(hu��n)����ָݔ늾�·��ȫ�ֺ��^�Y(ji��)��(g��u)ģ�������ȿ���Ӌ(j��)��õ��ģ����Ǿֲ����ϵK��ֲ��c�����δ֪�ģ��@Щ�ֲ��h(hu��n)�������ϵK���λ�á��C(j��)���˵Į�(d��ng)ǰλ�õȡ�
����3 �����C(j��)���˵��ⲿ������Ϣ�IJɼ�
�������������g(sh��)�IJ���l(f��)չ�c����ʹ�ó����C(j��)�����ڔ�(sh��)��(j��)��(l��i)Դ�и�����x��Ҳ�M���˸����(y��n)���Ҫ�����ܳ����C(j��)���˿���ʹ�ø��������c�߶ȼ��ɵĂ������M(j��n)�и��龫�_�ض�λ�c���ƣ��x�����M(j��n)�Ă�������(du��)�܇��ĭh(hu��n)����(sh��)��(j��)�M(j��n)�вɼ��r(sh��)�C(j��)���˱��ϵ���Ҫ�������C(j��)����Ҫ����������и��߾��ȡ��؏�(f��)�Ժá���(w��n)���Ըߵ����c(di��n)����(du��)һЩ���ӵĭh(hu��n)��Ҫ�������õ��m��(y��ng)���������������`���ȡ����Է���������Ҫ���m�ȣ���?y��n)��^�ߵĜ�(zh��n)�_���c�`���ȕ�(hu��)Ӱ�ϵ�y(t��ng)�Ĺ������ȣ�����������ܱ��C���_��Ҳ���܌�(sh��)�F(xi��n)��(zh��n)�_���ϵ�Ҫ��(j��ng)�^(gu��)���ϵķ����������xȡ�˼�����������t��������������������ȷǽ��|ʽ�Ă�������(g��u)���ϵK��ęz�y(c��)ϵ�y(t��ng)���ǽ��|ʽ�Ă�������ͨ�^(gu��)��ň�(ch��ng)���Ⲩ���t�⾀�����g���f���|(zh��)�M(j��n)�Йz�y(c��)��
����4 �ɔ_��Ϣ�ĔM���ų��^(gu��)��
��������(j��)��һ���ֵă�(n��i)�ݣ�ϵ�y(t��ng)ͨ�^(gu��)�o(w��)�E���ӞV������Ϣ�ں��㷨��(du��)�C(j��)���˵����M(j��n)���ƺɔ_�������(q��)��(d��ng)������ͬ�r(sh��)�������Ʊ��C(j��)��(g��u)���ߵ��(q��)��(d��ng)늙C(j��)�������C(j��)���˸���(j��)�������ɼ���(sh��)��(j��)����(sh��)��(j��)�ɼ���(j��ng)�^(gu��)��Ϣ�M�Ϯa(ch��n)������Դ��(sh��)��(j��)���@Щ��(sh��)��(j��)�����˕r(sh��)�C(j��)���˱��w���x�ϵK��ĸ��N��Ϣ����ϼ��⡢�t�⡢������������Ϣ������(j��)�����C(j��)���˵ĸɔ_�������̈D��D 5 ��ʾ��
�������P(gu��n)֪�R(sh��)���]���C(j��)���ˌ��I(y��)Փ��Ͷ��SCI�ڿ��ðl(f��)��
�����ڳ����C(j��)���˵�������Ҫ��Խ�����N���^���ӡ��͏����A��֧�θ������@Щ�O(sh��)��ͳɞ�����C(j��)������·�����ߵ��ϵK�^(q��)��������@Щ�ϵK���(sh��)�F(xi��n)�L(zh��ng)���x���ܱ��ϵ����߱���܉���ڱ������b�ĸ��N�������Ĕ�(sh��)��(j��)��(l��i)�R(sh��)�e�ϵK�����Ϣ����ɱ��ϲ��Ե��ƶ��c���τ�(d��ng)�������Č��t�⡢���⼰���ȷǽ��|�Ԃ������ɼ��܇��ĭh(hu��n)����(sh��)��(j��)����(j��ng)�^(gu��)����������(sh��)��(j��)�ںϺ��M(j��n)�б���Ӌ(j��)�㣬�����������b�ڳ����C(j��)���˵�ǰ������ 4 �棬��Ϣ�ںϳɞ�����C(j��)�������ǰ�е���Ҫ���A(ch��)��
����5 ϵ�y(t��ng)��(sh��)�(y��n)����
�������˸��õ��(y��n)�C���ĵ���Ϣ�ںϷ����ڳ����Ƅ�(d��ng)�C(j��)�����еă�(y��u)Խ�ԣ���(sh��)�(y��n)�У����Ϻ�ij����Ӌ(j��)�㹫˾�ęC(j��)���ˮa(ch��n)Ʒ����������Ʊ����ܷ���ƽ�_(t��i)���y(c��)ԇ�����ܰ������Ϝ�(zh��n)�_�ʣ��Ʊ��ٶȵ��P(gu��n)�Iָ��(bi��o)����(sh��)�(y��n)���������C(j��)���ˡ�YJV22 - 3* 300 ��|���䏝��ֱ���� 2. 5 m��ʹ��ʯ��ģ�M�ĸ���������ȣ���(du��)��(sh��)�(y��n)�Ђ������ɼ��Ĕ�(sh��)��(j��)��(j��ng)�^(gu��)��(sh��)��(j��)�A(y��)̎����ʹ�� Matlab 7. 0 ��(du��)���M(j��n)�М�(zh��n)�_�ʷ��档��(sh��)�(y��n)�зքe����|�O(sh��)�Þ鲻ͬ�Ļ���Ӌ(j��)���������ٶ��c�Ʊ��ٶȣ��քe��һЩ�������ڲ�ͬ�A���P(gu��n)�]��Ӌ(j��)���䔵(sh��)��(j��)�ںϵĜ�(zh��n)�_�ȣ�ʹ�ßo(w��)�E���ӞV������Ϣ�ں��c��(bi��o)��(zh��n)��������Ϣ�ںϵľ����`�(du��)�ȈD��D 6 ��ʾ��
�����D 6 �б�ʾ�Ę�(bi��o)��(zh��n)���ӞV�����V���r(sh��)�ľ����`������V�����а��� �� �� �V �� �� 1���� �� �V �� �� 2 �c��(bi��o)��(zh��n)�ә�(qu��n)�ںϞV������
�����ɈD 7 ��Ҋ(ji��n)����(j��ng)�^(gu��)�o(w��)�E���ӞV���㷨���º����Ϣ�ں�ϵ�y(t��ng)��(du��)��Ϣ�Ĝy(c��)���������^��(bi��o)��(zh��n)�����ӞV���㷨�����(zh��n)�_��ᘌ�(du��)��ͬ��(sh��)Ŀ�Ă�����ʧЧ��ϵ�y(t��ng)���`���ϱ��F(xi��n)���^�鷀(w��n)����׃���������`����� 0. 02 �������C��ԓ�������к�(qi��ng)�Č�(sh��)���ԡ�
����6 �Y(ji��)���Z(y��)
��������ᘌ�(du��)�����C(j��)�����еĂ���������ʧЧ��o(w��)���ṩ��(sh��)�r(sh��)��(zh��n)�_�Ĕ�(sh��)��(j��)��r���O(sh��)Ӌ(j��)����o(w��)�E���ӞV������Ϣ�ں�˼�뵽�����C(j��)���˵��O(sh��)Ӌ(j��)�У���һ���x���˼t�⡢���⼰�� 3 �N�ǽ��|ʽ���������b�ڳ����C(j��)���˵��܇�������(j��)���������c(di��n)�O(sh��)Ӌ(j��)���m�ϲ�ֱͬ���c���ȵij����C(j��)���ˣ���Q�˙C(j��)���˔�(sh��)��(j��)��(l��i)Դ��һ�Ć�(w��n)�}; �ڶ������ßo(w��)�E���ӞV�����g(sh��)��(du��)��Ϣ�M(j��n)���ںϣ���Q���ڷǾ��ԭh(hu��n)����ij��������Ϣ���Ǻ�(l��i)����Ϣ�ɔ_���ڲ�ͬ������ʧЧ����r��(du��)�C(j��)���˵ij��������M(j��n)���˜y(c��)ԇ���@�N�����C(j��)���˵ı��Ϝ�(zh��n)�_�ʸ��_(d��) 96. 3% ���ڂ������p�ĺ�ģ�ͻ֏�(f��)���ӕr(sh��)�����^(gu��) 3 s�����к�(qi��ng)�Č�(sh��)���ԡ�——Փ�����ߣ��Y�խ��������
���������īI(xi��n):
����[1]�O��ɏ������⣬������. һ�N���M(j��n)�ij��߉�ݔ늾�·Ѳ�z�C(j��)����Խ�Ϸ��� [J]. �C(j��)���� RoBOT. 2006��28 ( 4) : 379 - 35.
����[2]���F�P�����Q�A. ���ږŸ���g���Ƅ�(d��ng)�C(j��)���˿���·��Ҏ(gu��)������[J]. Ӌ(j��)��C(j��)�y(c��)���c���ƣ�2012��20 ( 1) : 164-167.
����[3]�ǹ�ƽ��Ф�ԕ�������(y��ng)������. �ܿո߉�ݔ늾��Ԅ�(d��ng)���ЙC(j��)���˵����� [J]. �Ї�(gu��)�C(j��)е���̣�2006��17 ( 3) : 237 - 240.
����[4]�� ᪣��x ֲ���O���x. Ѳ���C(j��)���˵İl(f��)չ�c��(y��ng)�� [J]. �C(j��)���˼��g(sh��)�c��(y��ng)�ã�2007��3: 37��42.
����[5]���L(f��ng)�࣬�ǐ�(��i)��(gu��)�����O��. �߉��ܿ�ݔ늾�·�Ԅ�(d��ng)Ѳ���C(j��)���˵����� [J]. ���ϵ�y(t��ng)�Ԅ�(d��ng)����2004��28 ( 23) : 59 - 91.
����[6]��Sٝ������ᷣ��O��(��i)��. ݔ늾�·Ѳ�z�C(j��)���˵��O(sh��)Ӌ(j��)�c����ϵ�y(t��ng)�о� [J]. ����I(y��)�Ԅ�(d��ng)����2008��30 ( 11) : 79 - 82.